Establishment method, model-free control method and verification method for ankle joint prosthesis model
A control method and ankle joint technology, applied in adaptive control, general control system, control/regulation system, etc., can solve problems such as the accuracy of the prosthesis model, and achieve the effect of simplifying the calculation process
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
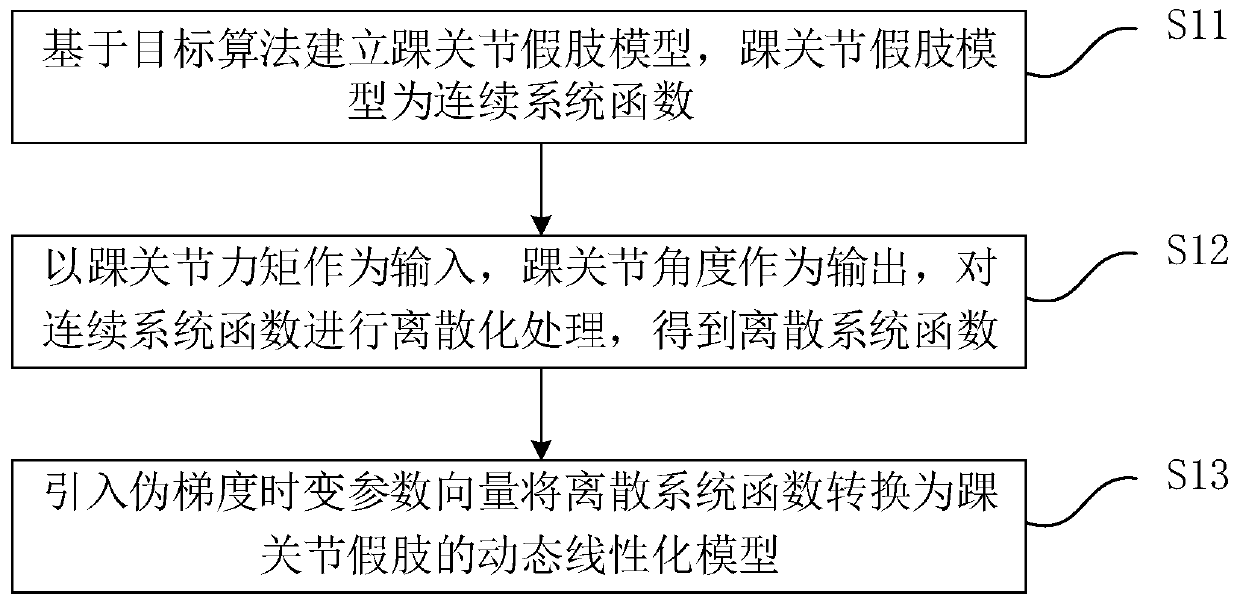
[0037] This embodiment provides a method for establishing a dynamic linearized model of an ankle prosthesis, which is applied to the establishment of an ankle prosthesis model in the field of prosthesis control, without establishing a mechanical model of the ankle prosthesis, such as figure 1 As shown, the method includes:
[0038] S11, establishing an ankle joint prosthesis model based on the target algorithm, where the ankle joint prosthesis model is a continuous system function.
[0039] Exemplarily, the target algorithm is a dynamic analysis method for establishing an ankle prosthesis model, which may be a Lagrangian dynamic analysis method. The target algorithm is not limited here, and those skilled in the art can determine it according to actual needs. Taking the Lagrangian dynamic analysis method as the target algorithm as an example, the ankle prosthetic model is established. The model is a continuous system function, which can be expressed as:
[0040]
[0041] Am...
Embodiment 2
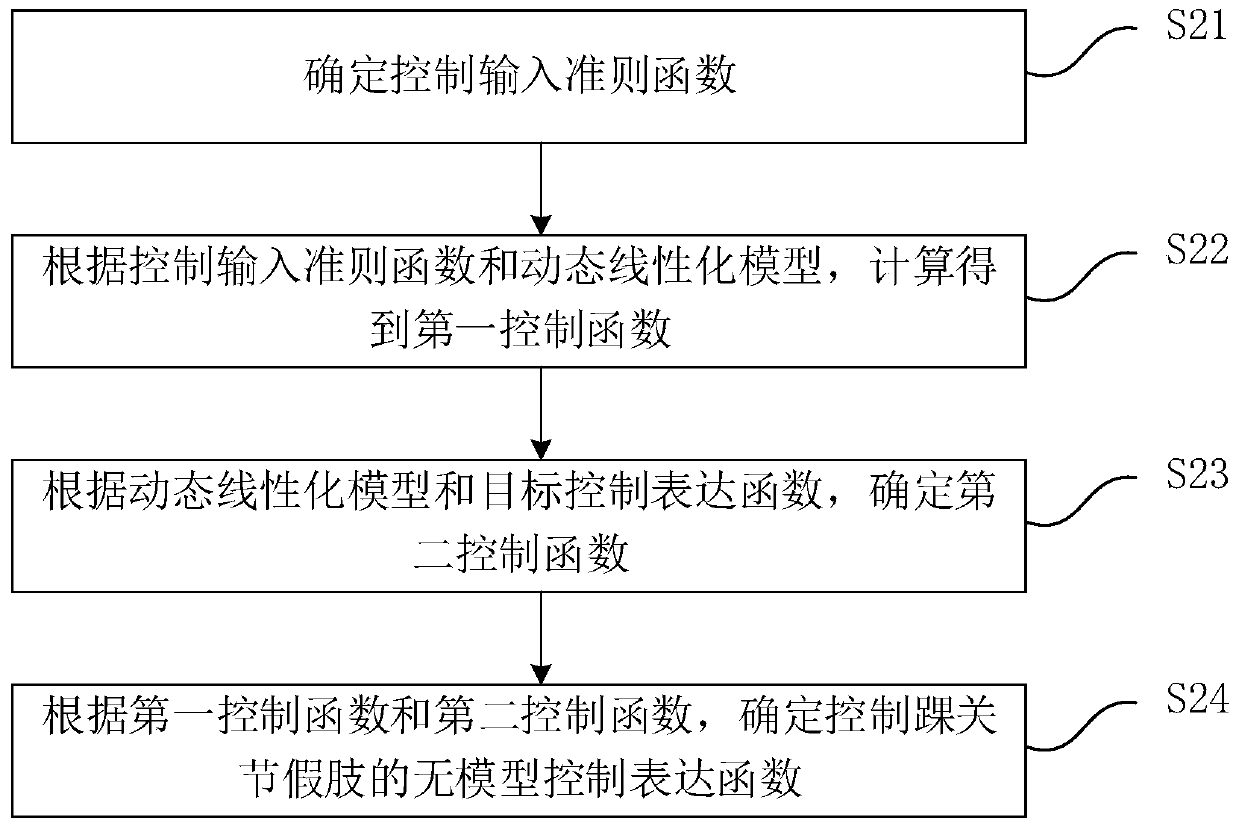
[0055] This embodiment provides a model-free control method for an ankle prosthesis, which is applied to control the establishment of an ankle prosthesis model, and can implicitly use the model or model structure information of the ankle prosthesis system without explicitly using the ankle prosthesis directly mechanical model information. Such as figure 2 As shown, the method includes:
[0056] S21. Determine a control input criterion function.
[0057] As an example, since minimizing the one-step forward forecast error criterion function may produce excessive control input, and minimizing the weighted one-step forward forecast error criterion function may produce a steady-state tracking error, consider the above-mentioned minimizing one-step For the problems existing in the forward forecast error criterion function and the minimized weighted one-step forward forecast error criterion function, the following control input criterion function can be adopted:
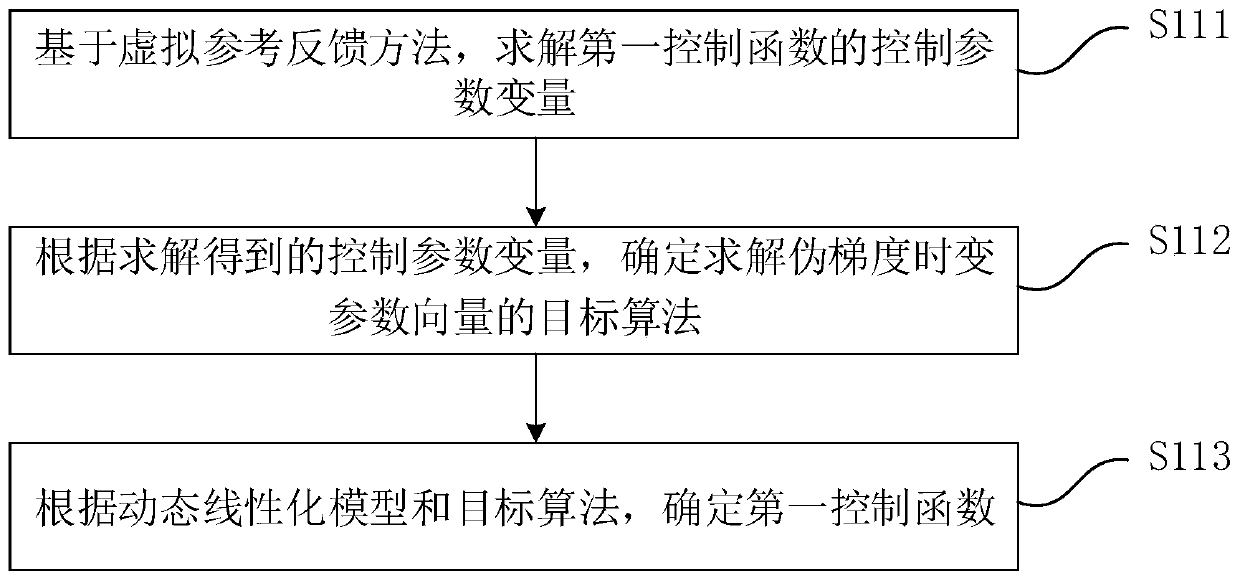
[0058] J(u(k))=...
Embodiment 3
[0124] This embodiment provides a method for verifying the control of the ankle prosthesis, which is applied to verify the control of the ankle prosthesis model, such as Figure 4 As shown, the method includes:
[0125] S31, building models of various parts of the human body based on the SolidWorks software.
[0126] Exemplarily, the SolidWorks software is used to build and assemble models of various parts of the human body with reference to national standards.
[0127] S32, setting relevant parameters of each part model of the human body based on the Adams software, and adding constraint pairs and driving pairs to the model of each part of the human body.
[0128] Exemplarily, the constructed human body model is imported into the Adams software, and the model parameters of each part of the human body are set. In the Adams software, the degrees of freedom of each part of the model are set by a constraint module (Joint module). This embodiment is aimed at the movement of the lo...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com