

A wall grinding path planning method, device, electronic equipment and storage medium
A path planning and shortest path algorithm technology, applied in grinding/polishing equipment, grinding automatic control devices, metal processing equipment, etc., can solve the problems of easy damage to the grinding head, poor grinding effect, and low efficiency of grinding operations, and achieve Save construction costs, reduce losses, and solve the effect of low efficiency in grinding operations
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 2
[0129] The embodiment of the present application provides a wall grinding path planning device, such as Figure 14 Shown is the structural block diagram of the path planning device. The unit includes:
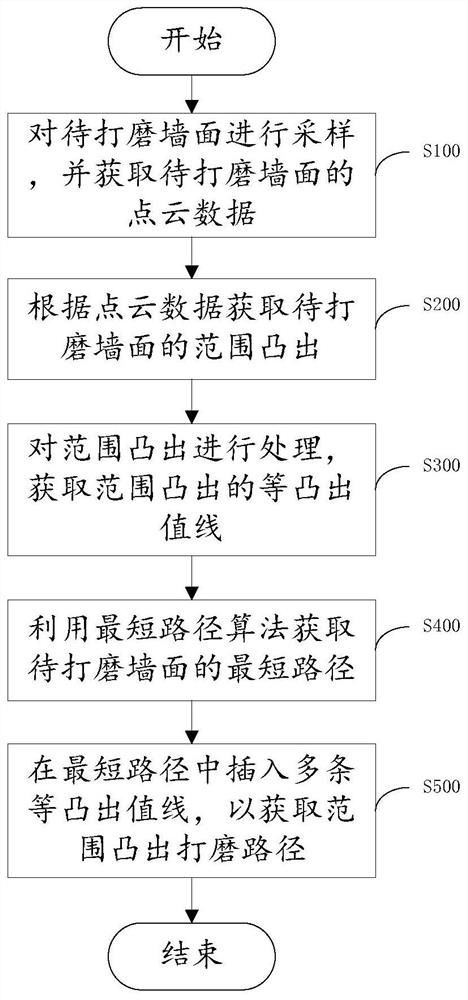
[0130] The point cloud data acquisition module 100 is used to sample the wall surface to be polished, and obtain the point cloud data of the wall surface to be polished;
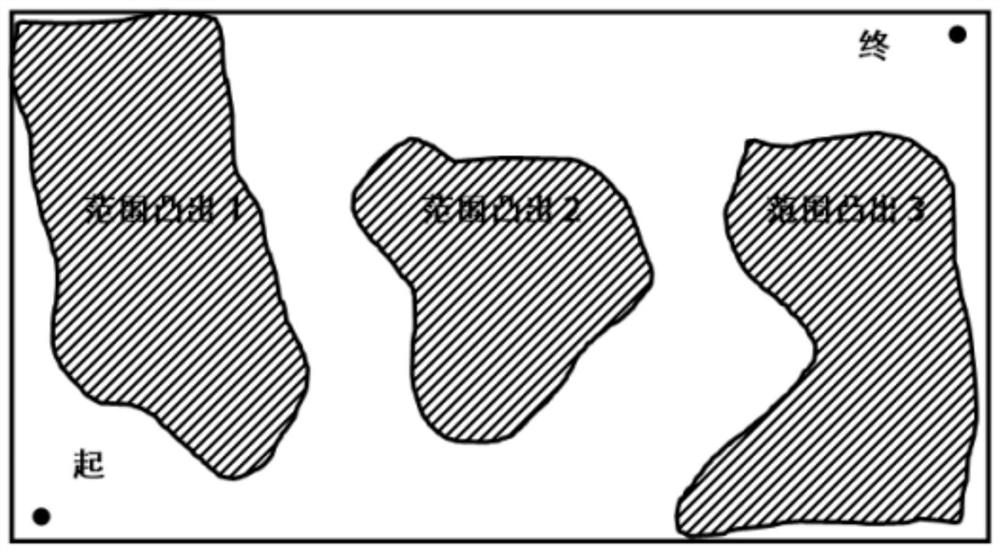
[0131] A range protrusion acquisition module 200, configured to acquire the range protrusion of the wall surface to be polished according to the point cloud data;
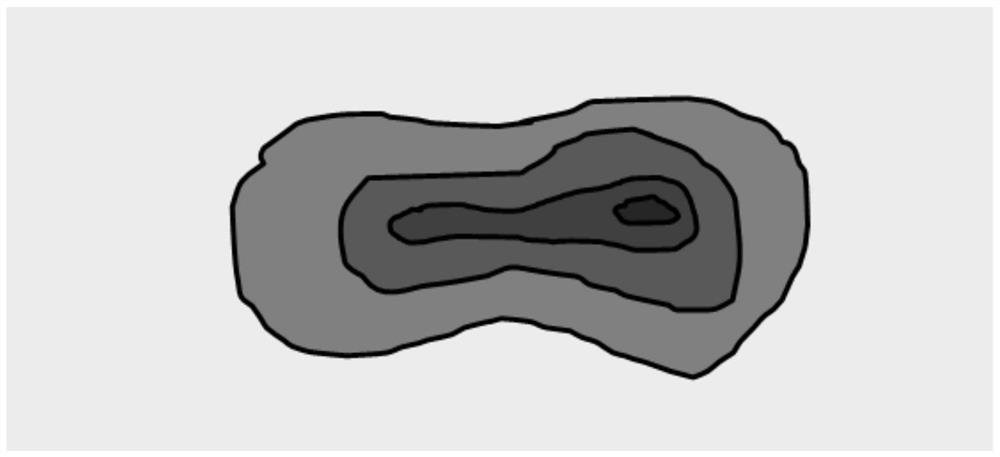
[0132] The contour contour acquisition module 300 is configured to process the range protrusion, so as to obtain multiple contour contours of the range protrusion;
[0133] The shortest path obtaining module 400 is used for the shortest path algorithm to obtain the shortest path of the wall surface to be polished;
[0134] The grinding path acquisition module 500 is configured to insert a plurality of isobulging value lines in the shortest path...
Embodiment 3
[0153] An embodiment of the present application provides an electronic device for wall grinding path planning, the electronic device includes a memory and a processor, the memory is used to store a computer program, and the processor runs the computer program to enable the computer device to execute the above-mentioned embodiment 1. The wall grinding path planning method described above.
[0154] The embodiment of the present application also provides a readable storage medium, where computer program instructions are stored in the readable storage medium, and when the computer program instructions are read and executed by a processor, the method described in Embodiment 1 is executed. Path planning method for wall grinding.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More