Construction of propulsion motion control equation of bionic undulatory fin and parameter setting optimization method thereof
A technology for advancing motion and control equations, applied in adaptive control, general control systems, control/regulation systems, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0085] In order to make the purpose and technical solution of the present invention clearer and easier to understand. The present invention will be further described in detail below in conjunction with the drawings and embodiments. The specific embodiments described here are only used to explain the present invention, not to limit the present invention.
[0086] In order to fully and clearly present the purpose, technical solutions and advantages of the present invention, a detailed description will be given below of a specific implementation method for constructing a bionic undulating fin propulsion motion control equation and its parameter setting optimization method with reference to the accompanying drawings. It should be noted in advance that for the convenience of description, the given drawings are only partial structural schematic diagrams related to the present invention, not all embodiments of the present invention.
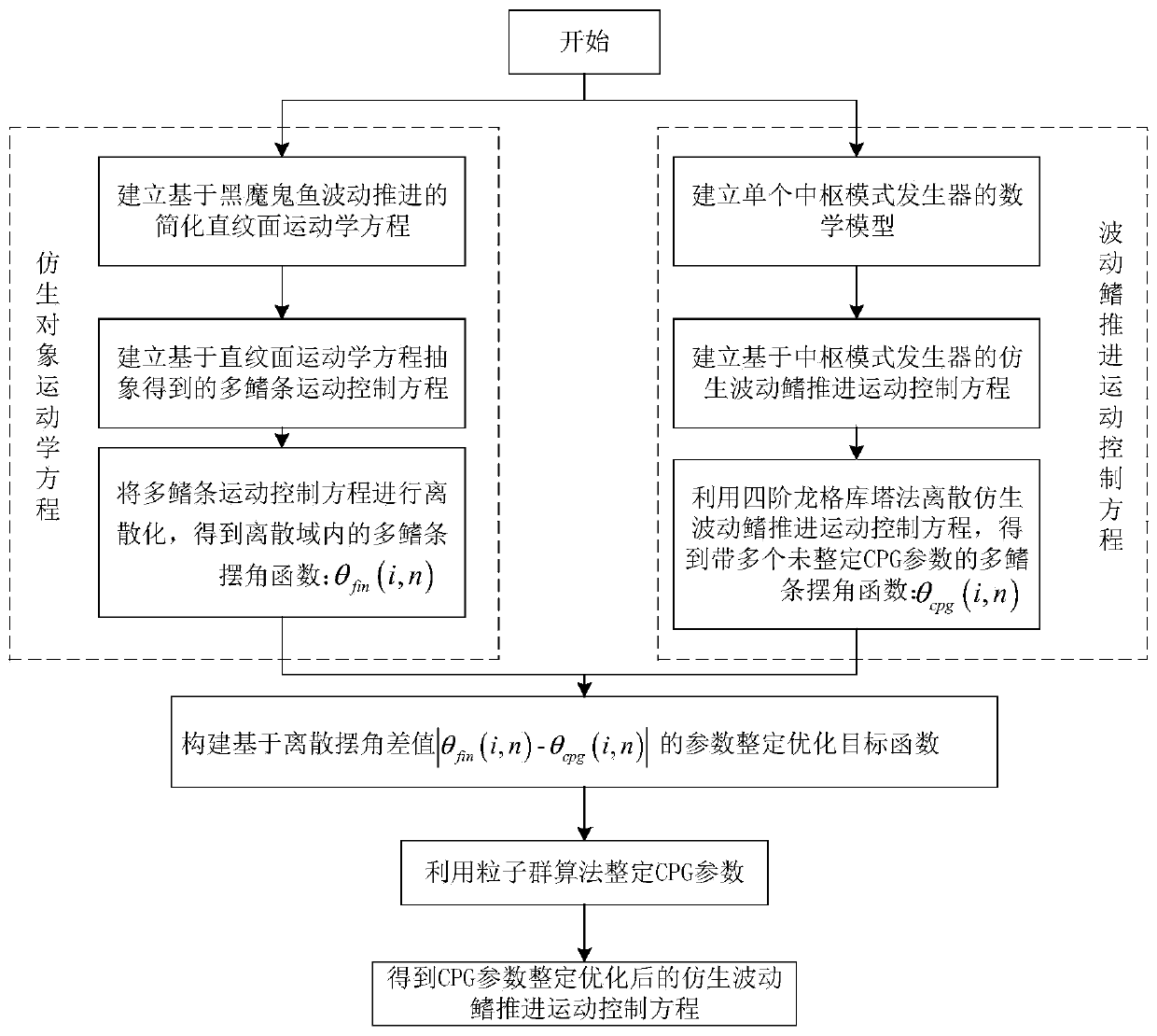
[0087] A method for constructing a motion control...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More