

Quadrotor unmanned aerial vehicle attitude dynamic surface control method and storage medium
A four-rotor UAV, dynamic surface control technology, applied in attitude control, non-electric variable control, control/regulation system and other directions, can solve the problems of singular value and reduced control performance.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0066] In order to explain in detail the technical content, structural features, achieved goals and effects of the technical solution, the following will be described in detail in conjunction with specific embodiments and accompanying drawings.
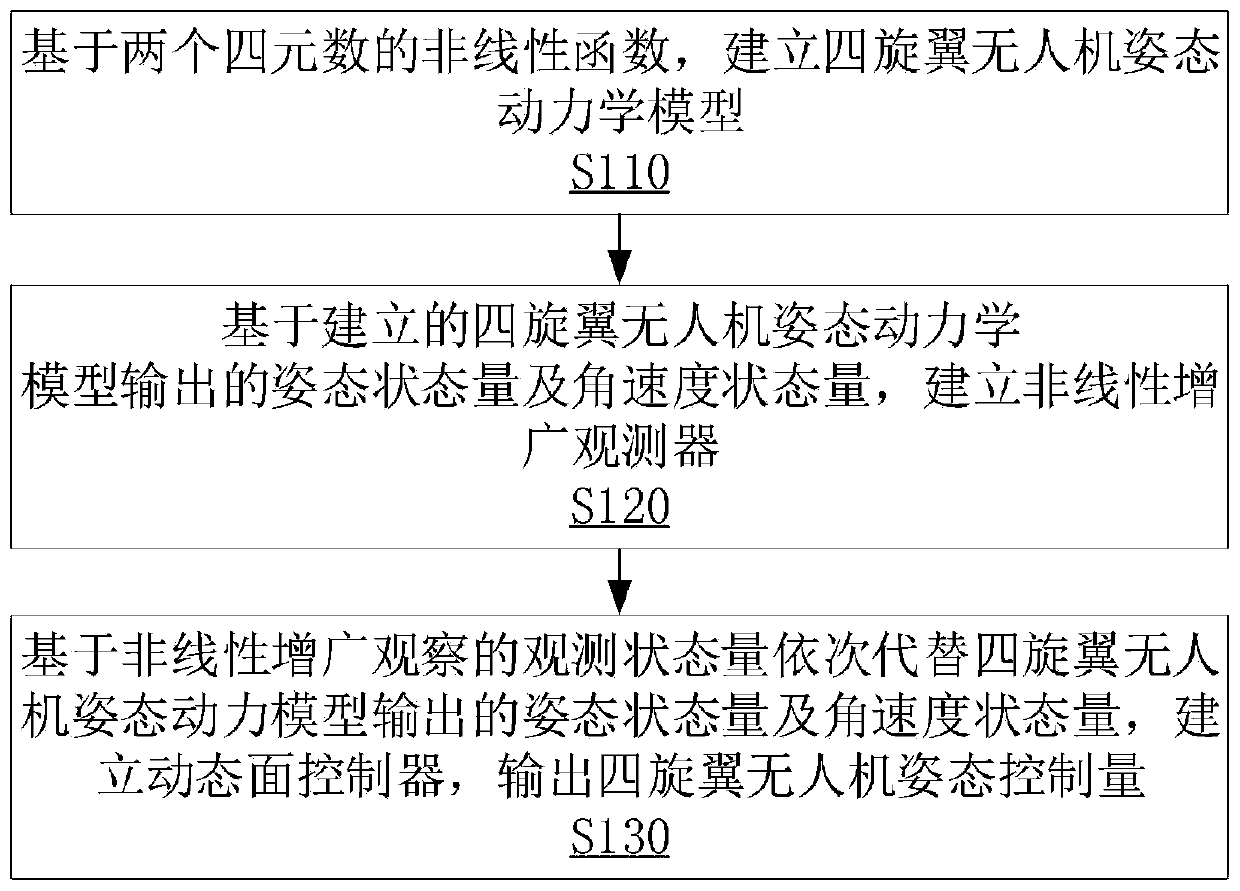
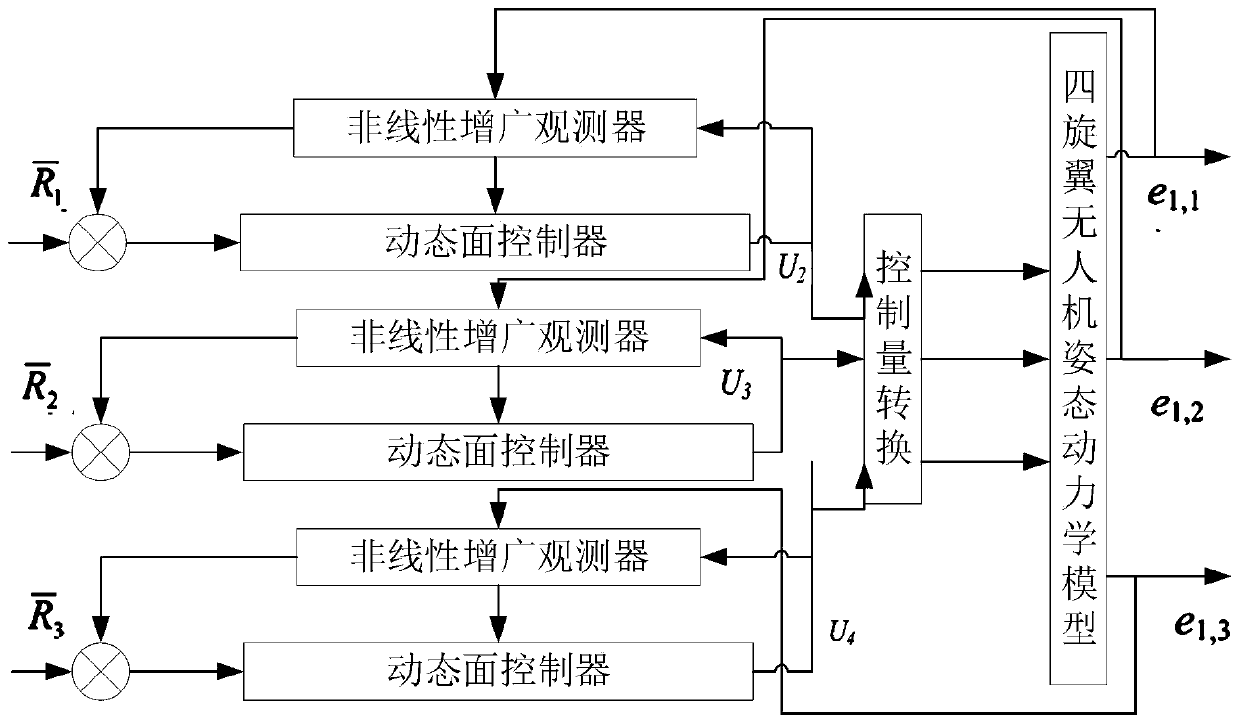
[0067] see Figure 1-2 , the present embodiment provides a nonlinear augmented observer-based quadrotor UAV attitude dynamic surface control method, comprising the following steps:
[0068] Step S110: Based on the nonlinear function of two quaternions, establish a quadrotor UAV attitude dynamics model;
[0069] Considering that the quadrotor UAV is in a hovering state, or in a low-speed flight state, according to the combined external moment M of the quadrotor UAV T Including control torque U, Coriolis torque M c , and the uncertainty factor moment Δ, determine the attitude dynamics model of the quadrotor UAV as ω is the body coordinate E B Down relative to the inertial coordinate E I the angular velocity of J is the moment of...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More