

Dynamic region division method, region channel identification method and cleaning robot
A dynamic area and robot technology, applied in the field of cleaning robots, can solve the problems that robots cannot make good use of sub-area cleaning, and achieve the effects of reducing the probability of shuttle work, improving cleaning efficiency, and high environmental adaptability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
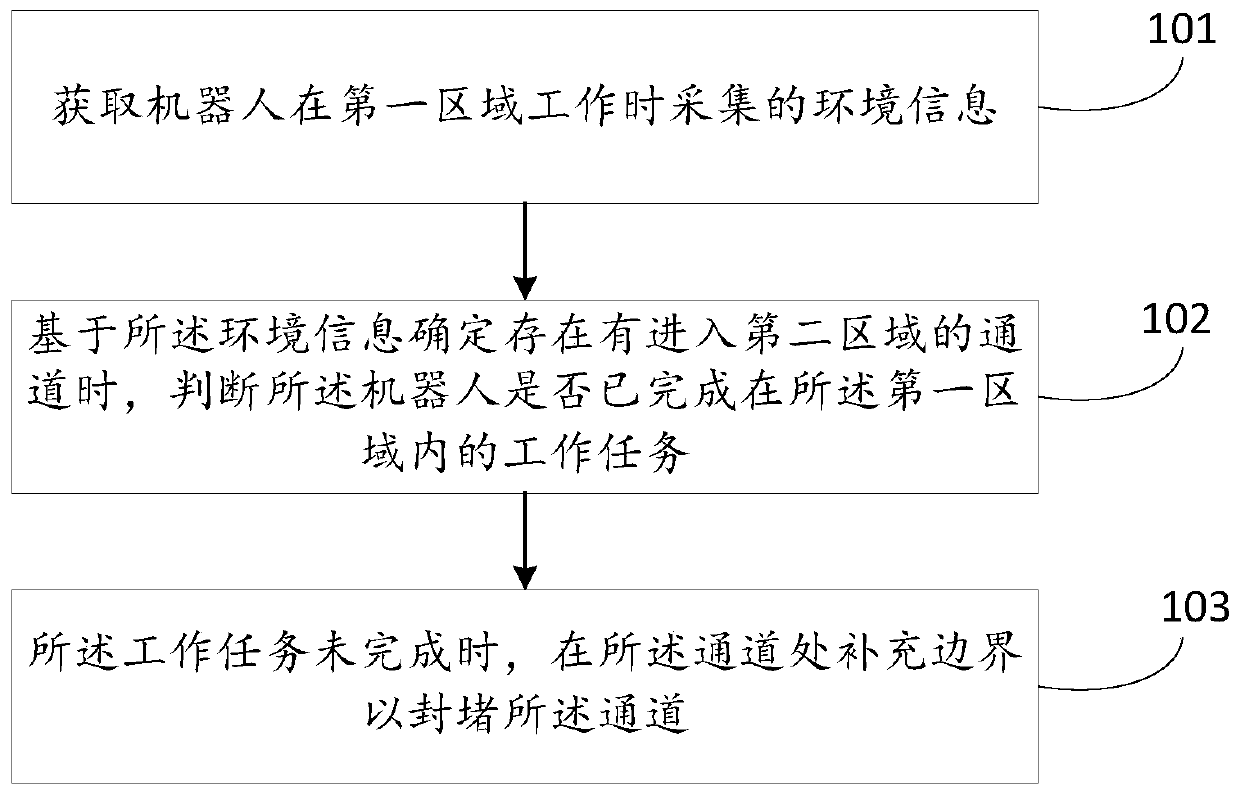
[0051] Cleaning robots, such as sweeping robots, complete the cleaning by traversing the entire apartment area when cleaning the family room. If it is impossible to distinguish different rooms for cleaning separately, the robot will repeatedly enter and exit the same room, or appear alternately between different rooms. It needs to repeatedly enter and exit to complete the cleaning task of a room, which directly leads to low cleaning efficiency; indirectly leads to Repeated sweeping, missed sweeping, etc., even cannot completely clean the entire apartment. In order to solve the above problems, it is necessary to identify the room and follow the principle of cleaning a single room before entering the next room.
[0052] There is a static partitioning scheme in the prior art. Static zoning scheme, that is, after the cleaning robot completes at least one cleaning, it can outline the house type map of the entire house; then partition the house type map to divide different rooms, a...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More