

AUV capture guiding method based on acoustic and optical guiding
An optical and acoustic technology, applied in the direction of transportation and packaging, warships, special-purpose vessels, etc., can solve problems such as easy deviation from the channel, AUV damage, and influence on the accuracy of underwater acoustic positioning, and achieve the effect of improving the safety factor
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
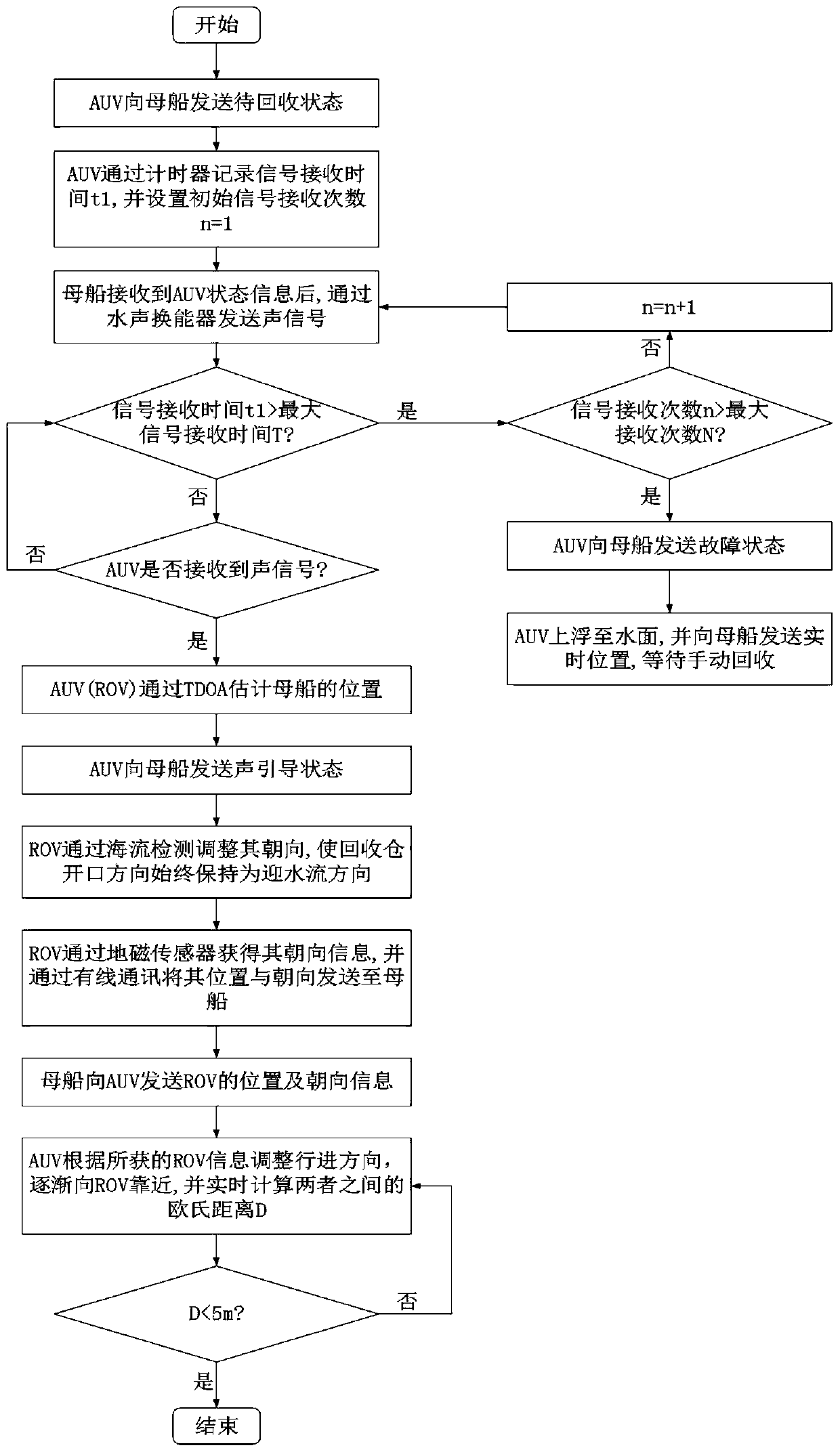
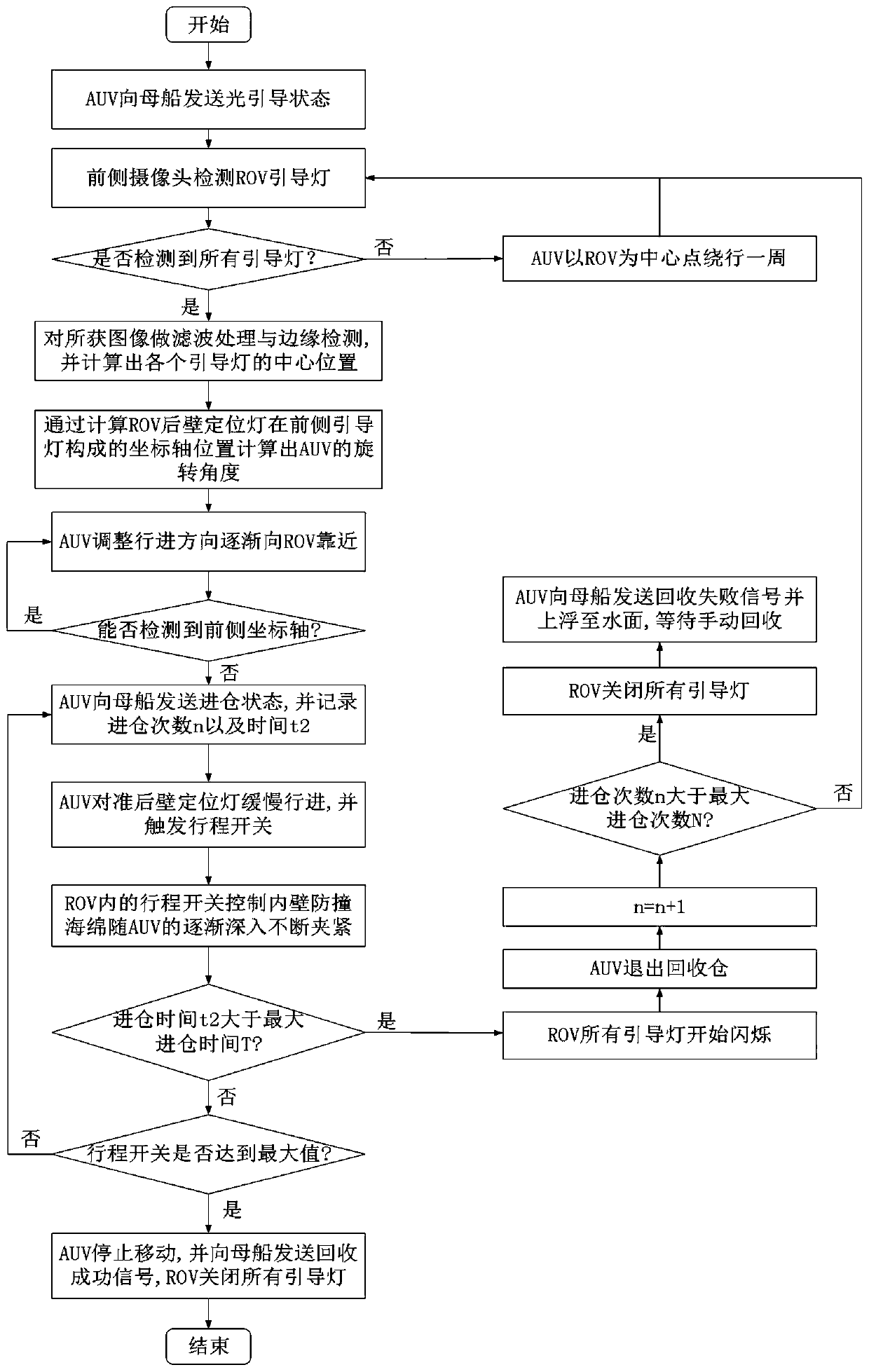
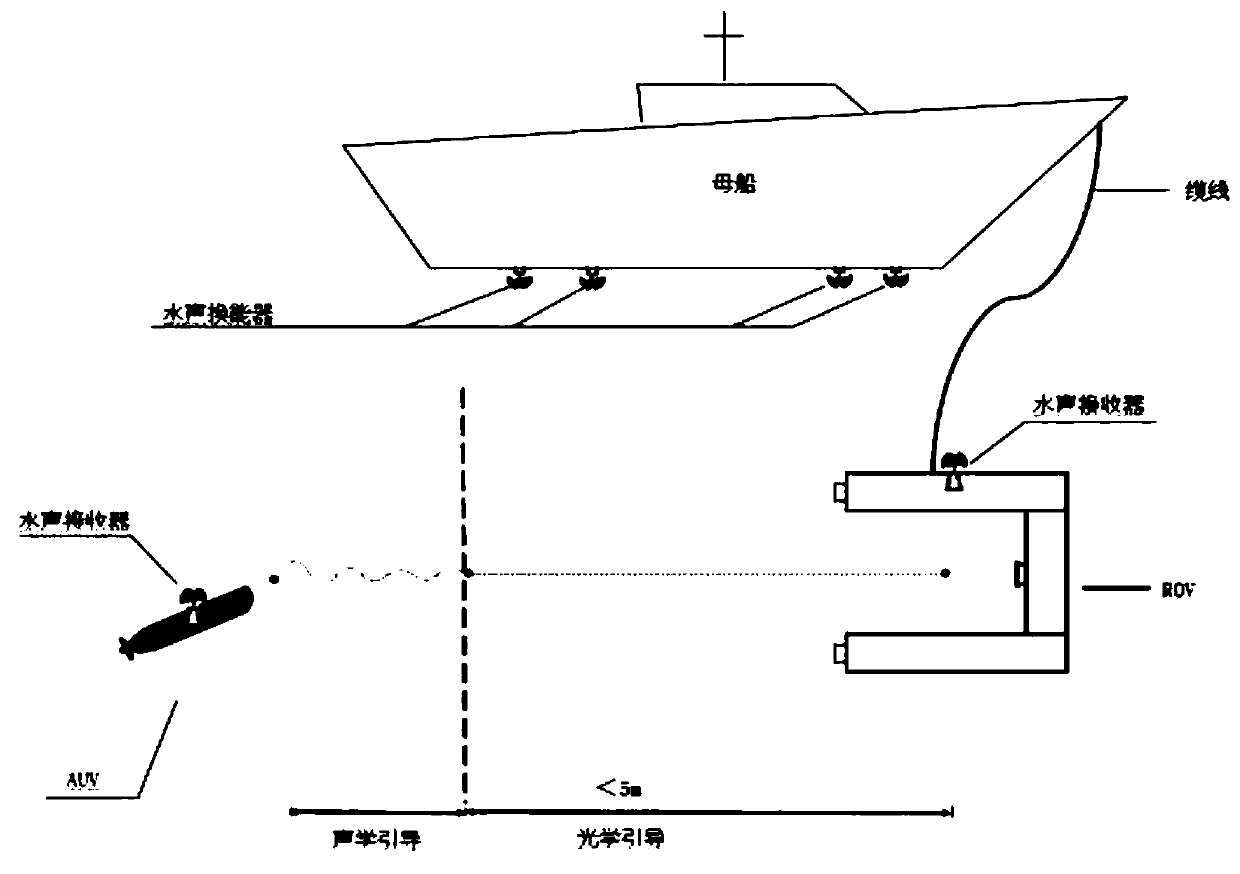
[0035] Embodiment: Acoustic guidance process: when the AUV enters the recovery stage, the underwater acoustic transducers arranged at four fixed positions at the bottom of the mother ship will send a signal every 5 seconds after receiving the recovery order, such as image 3 and Figure 4 As shown, the AUV and ROV receive signals through the underwater acoustic signal receiver. After receiving the signal, the arrival time of different signals is calculated by detection, and the difference between the arrival time of different signals (TDOA) is obtained, and further inverse Calculated as the measured distance difference between different underwater acoustic transducers, a set of nonlinear hyperbolic equations can be obtained, and the solution obtained by solving the corresponding equations is the relative position estimation of the mother ship relative to the AUV (or ROV). ROV Its relative position is transmitted back to the mother ship through underwater acoustic communication...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More