Precise vertical recovery control method for large-airspace high-dynamic rocket sublevel landing area
A control method and high dynamic technology, applied in the direction of offensive equipment, projectiles, self-propelled bombs, etc., can solve the problems of large flight trajectory deviation, lack of generalization and versatility, and failure to guarantee the accuracy of landing points, etc., to achieve low The effect of cost recovery and difficulty in development
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
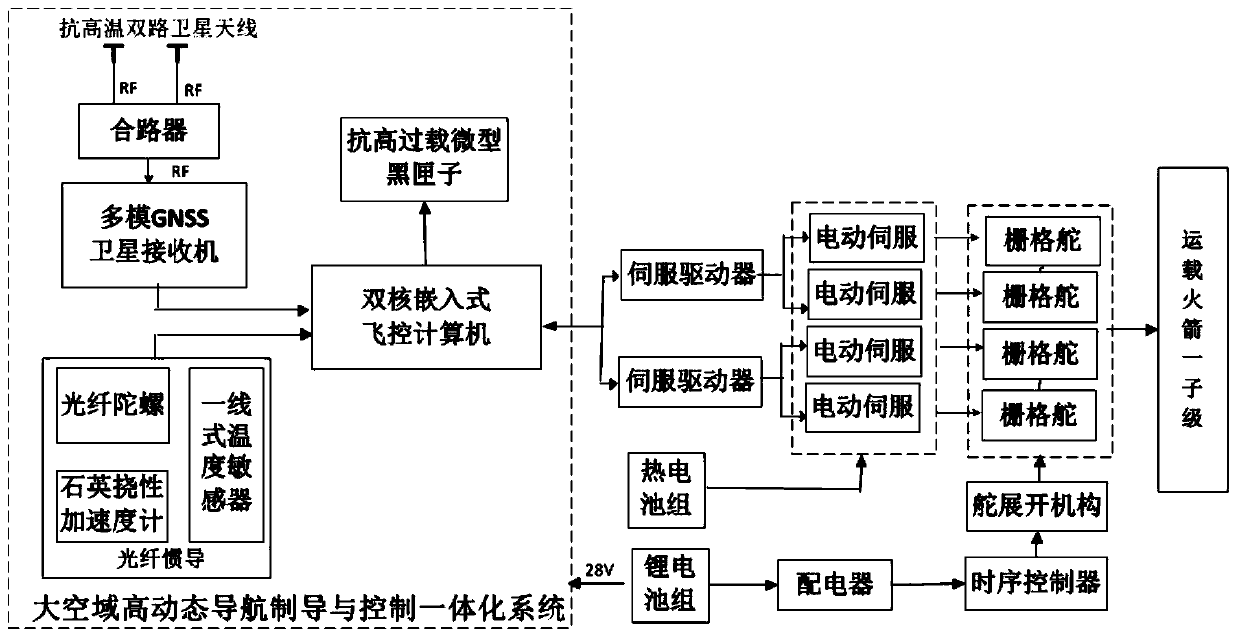
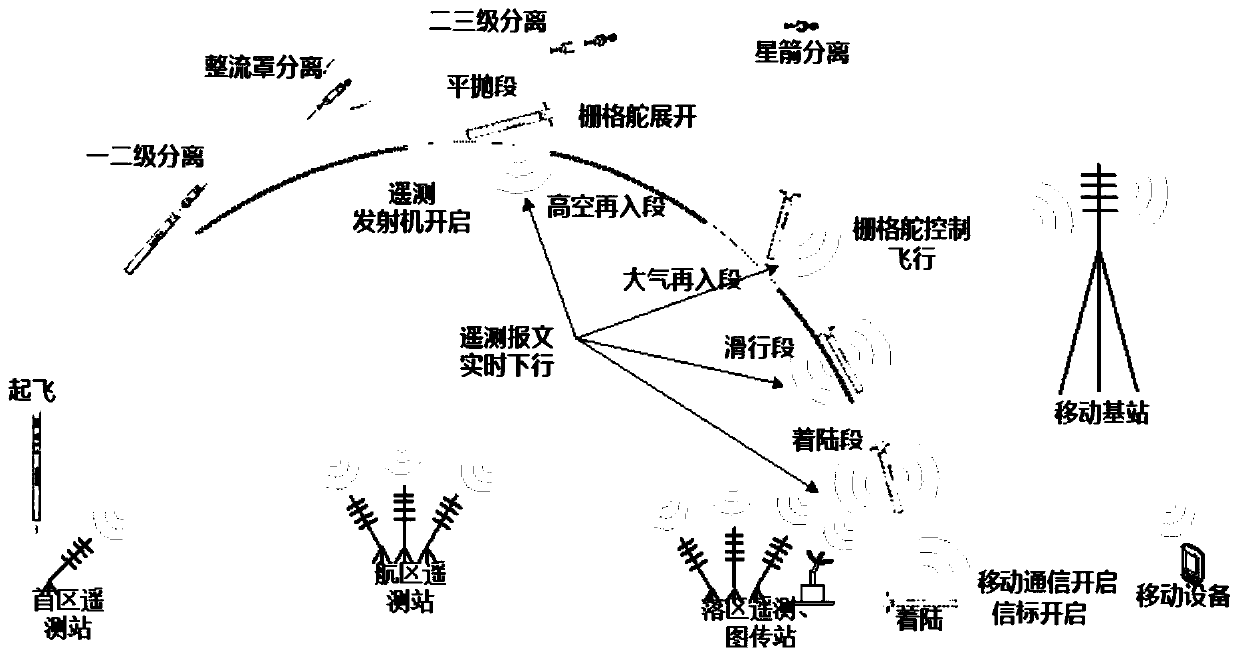
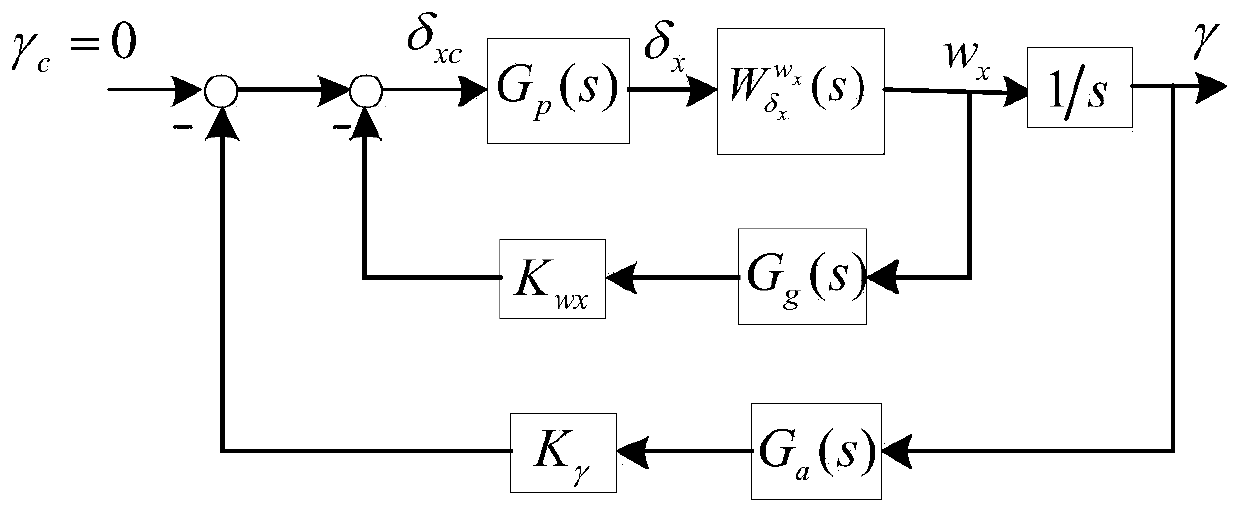
[0062] figure 1 It is the configuration diagram of the precise vertical recovery control system of the rocket sub-stage landing zone, figure 2 It is a schematic diagram of the flight of a highly dynamic rocket sub-stage in a large airspace, refer to figure 2 , design controller parameters and control calculation module process as follows image 3 shown.
[0063] Through the current Mach number and position information of the first sub-stage of the rocket provided by the rocket-borne integrated navigation system, when the start-up and control conditions are met, the guidance process starts, which can be divided into two stages:
[0064] The first stage: After the control is activated, the longitudinal overload command adopts the improved proportional guidance method with a virtual target point. Transition mode: using exponential transition, Δx=Δx 0 .e -Δt . Δt=t cs -t f is the transition time, t cs is the control system time, t f is the start time of the preceding d...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com