Transformer substation inspection robot system
A robot system and substation technology, applied in the field of substation inspection robot system, can solve the problems of high labor intensity, scattered detection quality, low work efficiency, etc., and achieve the effect of optimizing the scope of work and performing tasks accurately
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0014] In order to make the object, technical solution and advantages of the present invention clearer, the present invention will be further described in detail below in conjunction with the accompanying drawings and embodiments. It should be understood that the specific embodiments described here are only used to explain the present invention, not to limit the present invention.
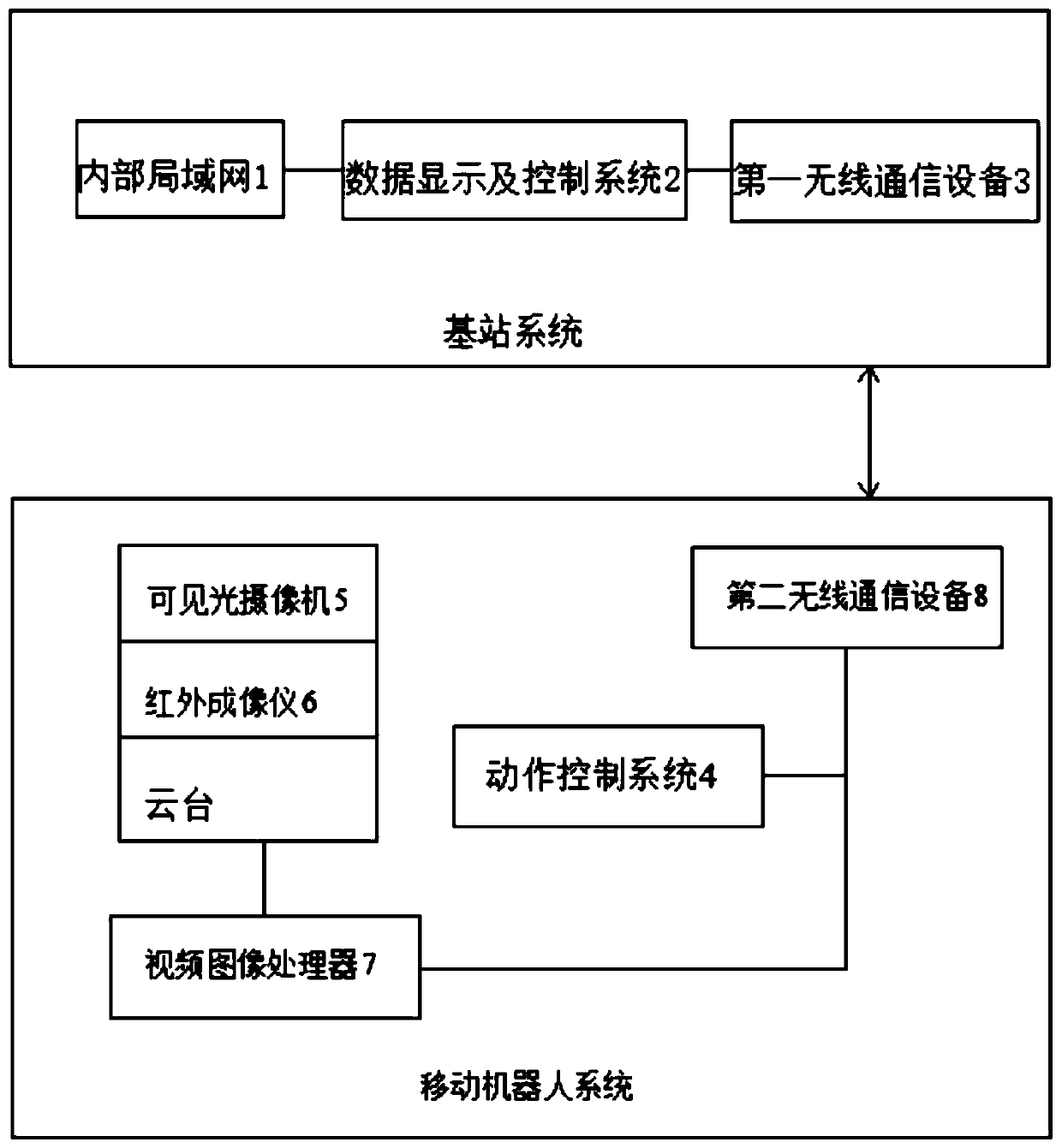
[0015] Such as figure 1 As shown, the embodiment of the present invention provides a substation inspection robot system, including a base station system and a mobile robot system. The base station system includes an internal local area network 1, a first wireless communication device 3 and communicates with the internal local area network and the first wireless communication device respectively A data display and control system 2 connected to the equipment, the mobile robot system includes a motion control system 4, a visible light camera 5 and an infrared imager 6 installed on the platform, and a ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More