

Underwater target tracking method based on forward-looking sonar image
A technology for underwater targets and sonar images, applied in the field of image processing, can solve problems such as large amount of calculation, low efficiency, and inability to deal with matching problems, so as to improve real-time performance, reduce target deviation and loss, and avoid poor robustness Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0033] The specific embodiments of the present invention will be described in detail below in conjunction with the accompanying drawings.
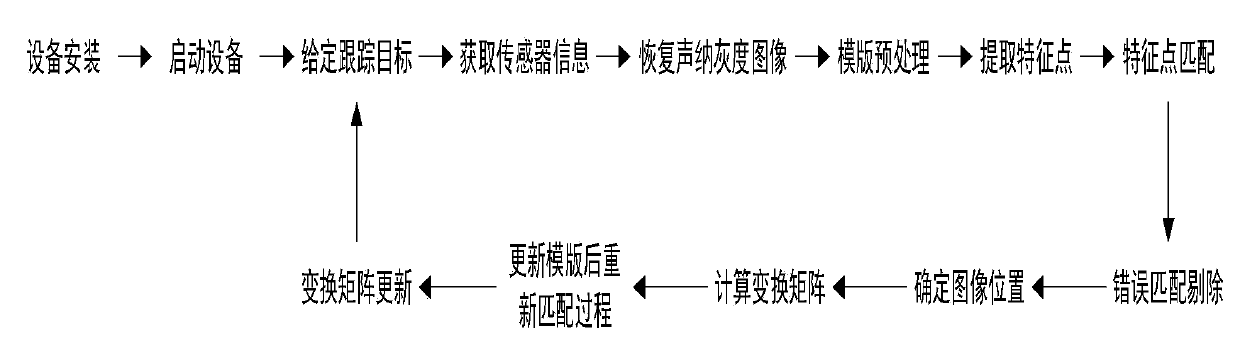
[0034] The steps to achieve goal tracking are:
[0035] (1) Install the GPS, the attitude sensor and the gimbal on the ship; the gimbal is installed on the bow bracket, its horizontal rotation plane is parallel to the deck, the rotation center is as far as possible on the central axis of the ship, the GPS is installed in the center of the hull, and the attitude The installation position of the sensor should ensure that its center line coincides with the center axis of the hull. The PTZ controller and PC are placed on the ship, and the data lines of each part are connected.
[0036] (2) Start the PC, GPS, attitude sensor, gimbal, and forward-looking sonar; check whether the data link communication of each part is normal.
[0037] (3) Control the pan / tilt to move within the detection range through the PC, and specify the tracking target. ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More