

Multi-AGV collision-free operation path planning method and scheduling system
A path planning and collision-free technology, which is applied in the control/regulation system, vehicle position/route/height control, transportation and packaging, etc., to reduce labor costs, accelerate intelligent transformation, and reduce waiting time
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
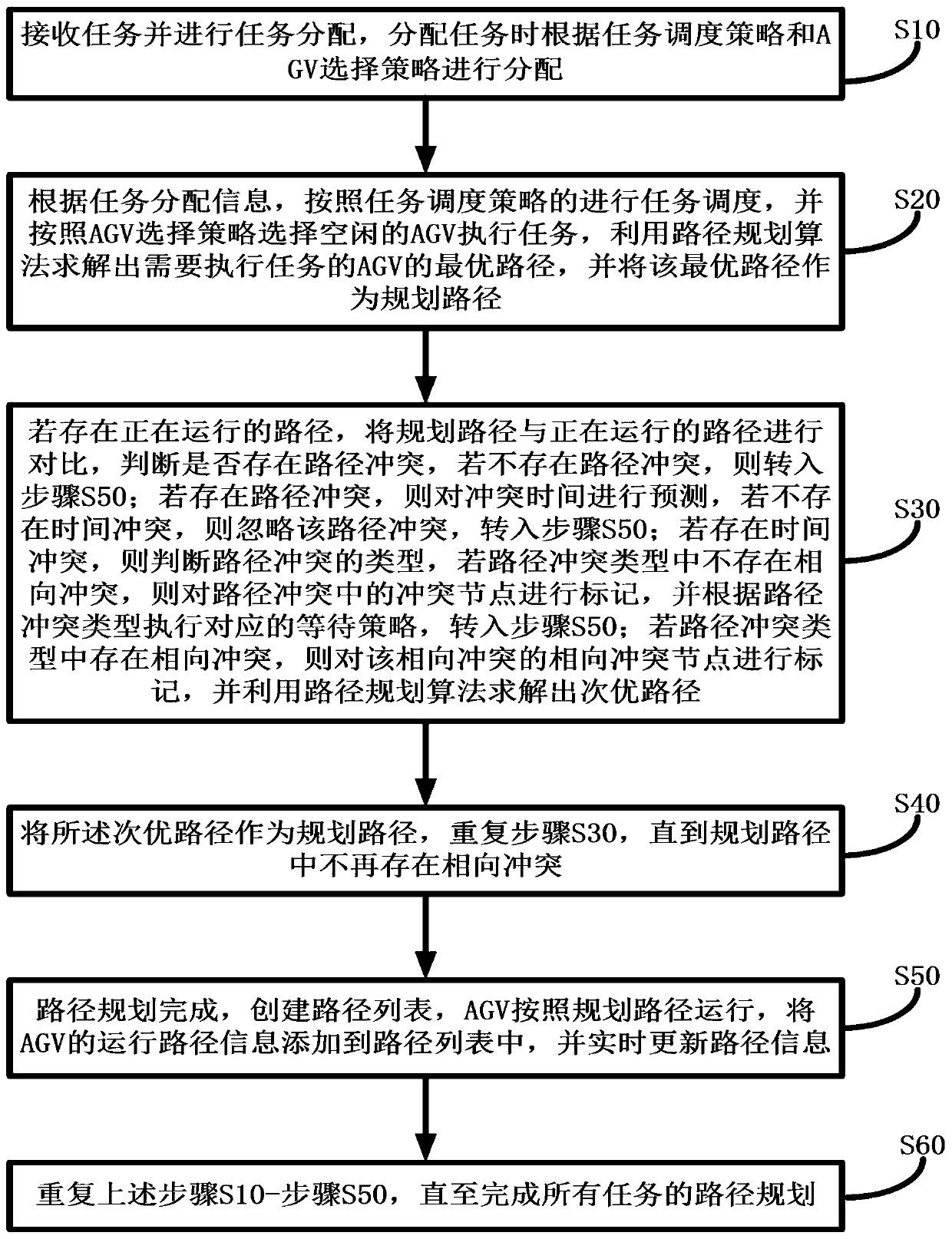
[0029] as attached figure 1 Shown, a kind of path planning method of multi-AGV collision-free operation, described path planning method comprises:
[0030] S10. Receive tasks and perform task assignment, and assign tasks according to task scheduling strategy and AGV selection strategy;
[0031] S20. According to the task allocation information, perform task scheduling according to the task scheduling strategy, and select an idle AGV to perform the task according to the AGV selection strategy, use the path planning algorithm to solve the optimal path of the AGV that needs to execute the task, and use the optimal path as a planned path;
[0032] S30. If there is a running path, compare the planned path with the running path to determine whether there is a path conflict, and if there is no path conflict, go to step S50;
[0033] If there is a path conflict, then predict the conflict time, if there is no time conflict, then ignore the path conflict, and go to step S50; if there ...
Embodiment 2
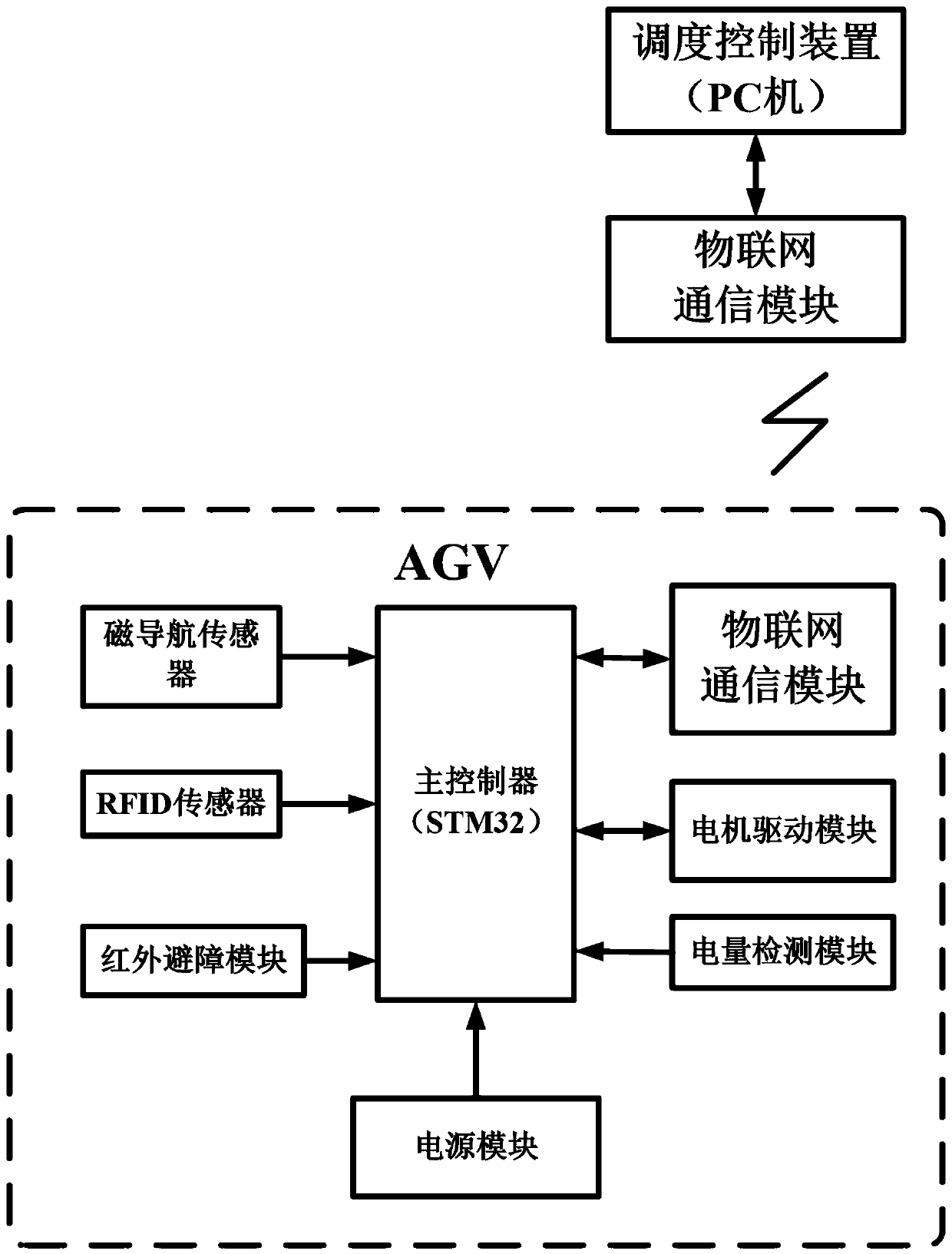
[0066] This embodiment provides a multi-AGV scheduling system, as attached figure 2 As shown, it includes a dispatching control device and more than two AGVs; specifically, the AGV includes a main controller, a navigation module connected to the main controller, an RFID sensor, an infrared obstacle avoidance module, a power detection module, an object A networking communication module, a motor drive module and a power supply module; the dispatching control device is provided with an Internet of Things communication module, and the dispatching control device communicates with each AGV through the Internet of Things communication module. Preferably, the navigation module is preferably a magnetic navigation sensor. When the dispatching system dispatches and controls each AGV, it adopts the route planning method described in Embodiment 1 for dispatching. For the specific route planning method, please refer to Embodiment 1, which will not be repeated here.
[0067] Among them, at...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More