

Preparation method of indoor occupation grid map based on RGB-D information
A technology that occupies grids and maps. It is applied in the direction of specific mathematical models, image enhancement, and image analysis. It can solve the problems of restricting consumer market demand and high cost of lidar, and achieve high practical value and low cost. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
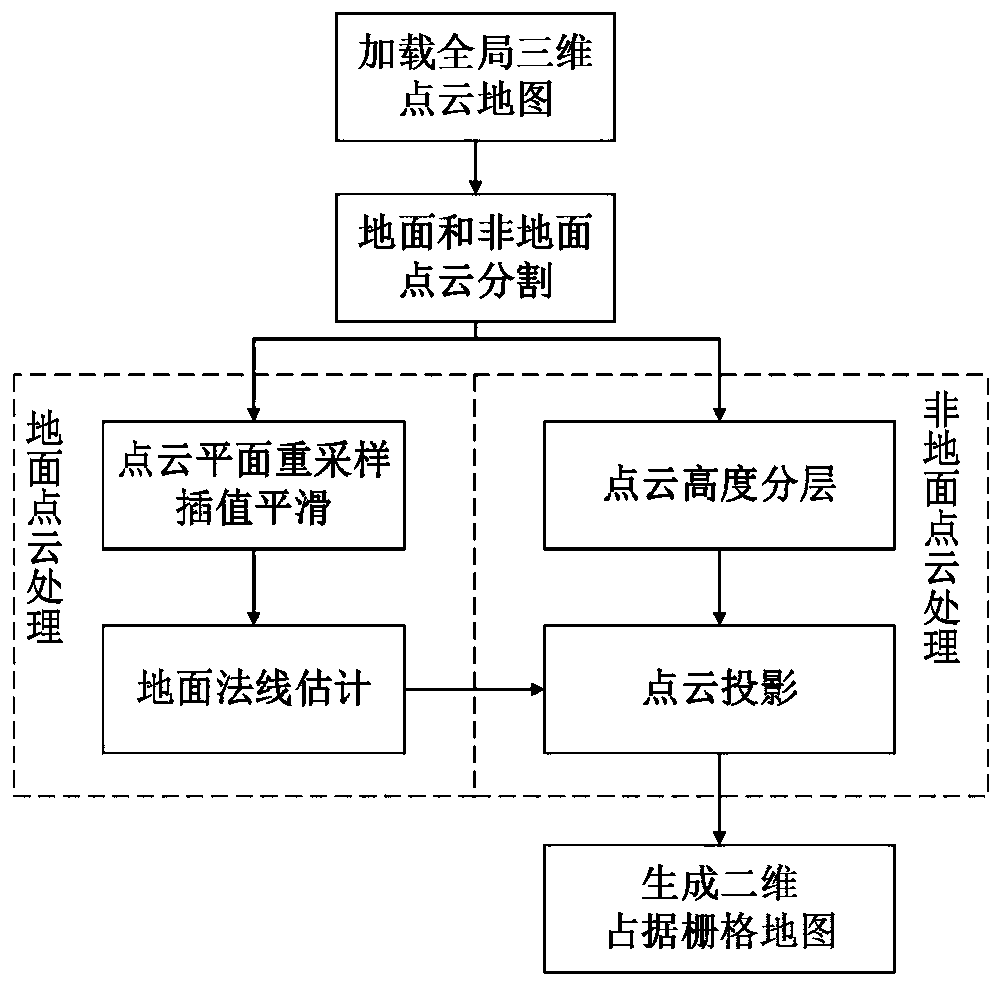
[0027] In the present invention, the global point cloud map is spliced according to the camera pose, and after preprocessing such as downsampling and noise point elimination, the morphological progressive filter algorithm is used to segment the ground point cloud and the non-ground point cloud, and the ground point cloud is smoothed. In order to estimate the normal, the non-ground point cloud at different height levels is projected to a two-dimensional plane and divided into grids, and the occupancy state is updated by Bayesian probability estimation method.
[0028] Such as Figure 1-6 As shown, an embodiment of the present invention provides a method for preparing an indoor occupancy grid map based on RGB-D information, and the preparation method includes the following steps:
[0029] S1. Use the Kinect camera to simultaneously collect the color image and depth image sequence of the indoor scene. For a single pair of color image and depth image, combine the camera pose, ca...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More