

Neural network control system of exoskeleton robot based on intention recognition
An exoskeleton robot and neural network control technology, applied in the field of intention recognition, can solve problems such as immature operation, complexity, and no mention of brain excitement, to achieve convenient control, improve accuracy, solve real-time and control resoluteness sticky effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0044] The present invention will be described in detail below in conjunction with specific embodiments. The following examples will help those skilled in the art to further understand the present invention, but do not limit the present invention in any form. It should be noted that those skilled in the art can make several changes and improvements without departing from the concept of the present invention. These all belong to the protection scope of the present invention.
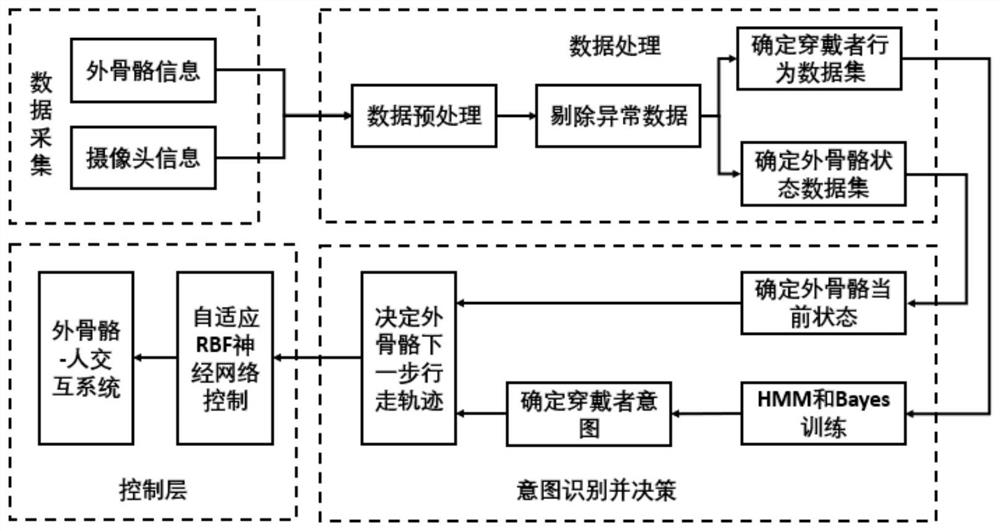
[0045] A neural network control system for an exoskeleton robot based on intention recognition provided according to the present invention, comprising:
[0046] Intent classification module: classify the wearer's intention;
[0047]Action and trajectory planning module: set the rehabilitation training action of the patient, collect the EMG signal of the lower limbs of the human body, collect the gait data of the human body when walking, and plan the movement trajectory in the joint space of the lower li...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More