

ASR Adaptive Nonsingular Terminal Sliding Mode Control Method Based on Multi-agent
A non-singular terminal, multi-agent technology, applied in the field of distributed drive electric vehicle drive anti-skid system control, can solve problems such as changes in road adhesion conditions, tire nonlinear characteristics, limited computing resources, etc., to reduce chattering and Complexity, the effect of reducing system energy consumption
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0021] The present invention will be described in further detail below in conjunction with the accompanying drawings and specific embodiments.
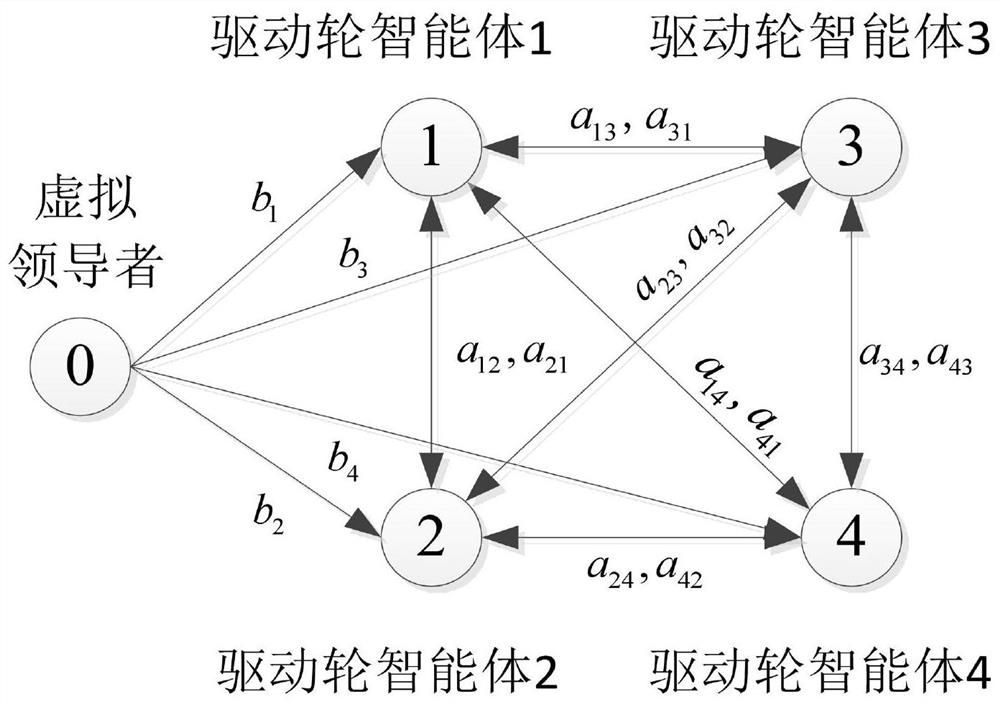
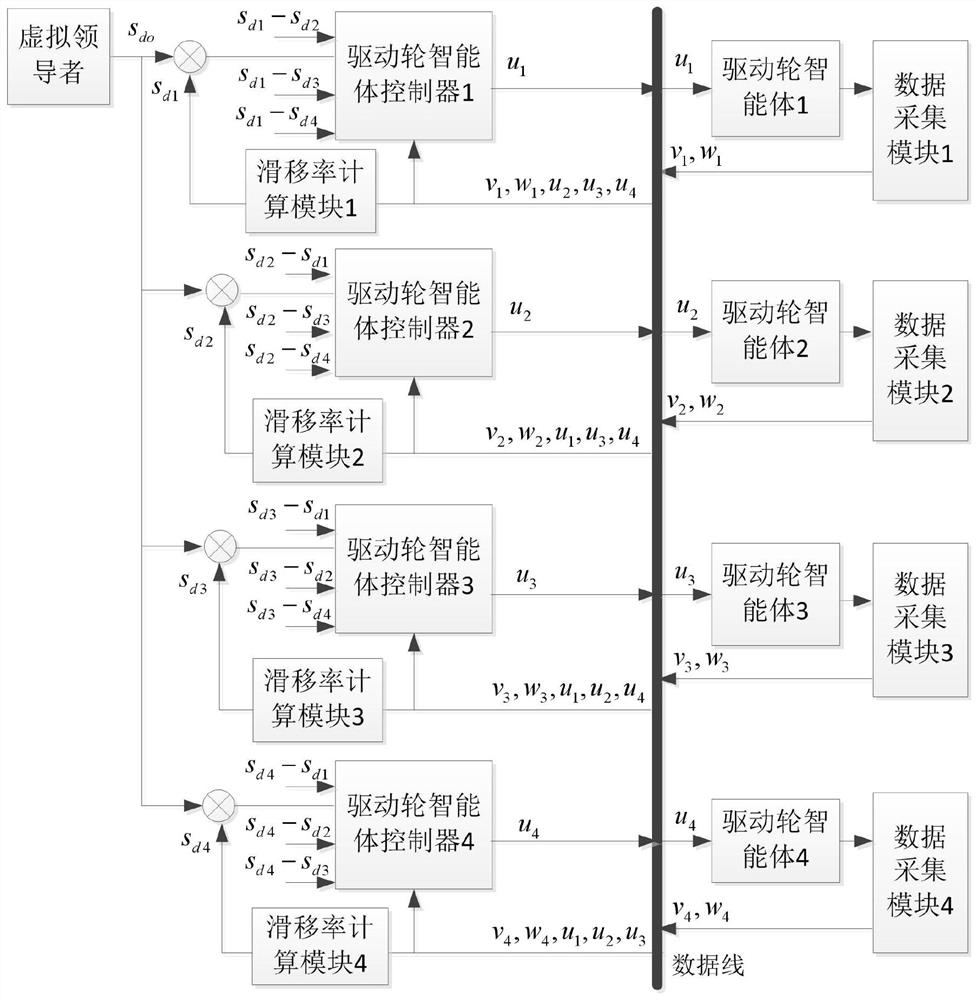
[0022] Such as figure 1 As shown, in the ASR self-adaptive non-singular terminal sliding mode control method based on multi-agents in the present invention: according to the hardware connection structure and the internal working communication principle of the four driving wheels of the distributed drive electric vehicle, the ideal slip rate is selected as the virtual leader 0, the four driving wheel systems are respectively used as four follower agents, that is, driving wheel agent 1, driving wheel agent 2, driving wheel agent 3 and driving wheel agent 4, each driving wheel agent can Obtain state signals for the virtual leader and adjacent driving wheel agents. By designing the control strategy of a single driving wheel agent considering the state information of its own agent and adjacent agents, the actual slip rate of the system un...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More