

Idle stroke non-interference trajectory planning method for multi-spindle-head machining
A technology of trajectory planning and idle travel, which is applied in the non-interference trajectory planning of idle travel of multi-axis head and five-axis machining, and in the field of CNC machining path planning, which can solve the problems of collision and interference between tools and workpieces
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0066] The present invention will be further described below with reference to the accompanying drawings and in combination with preferred embodiments.
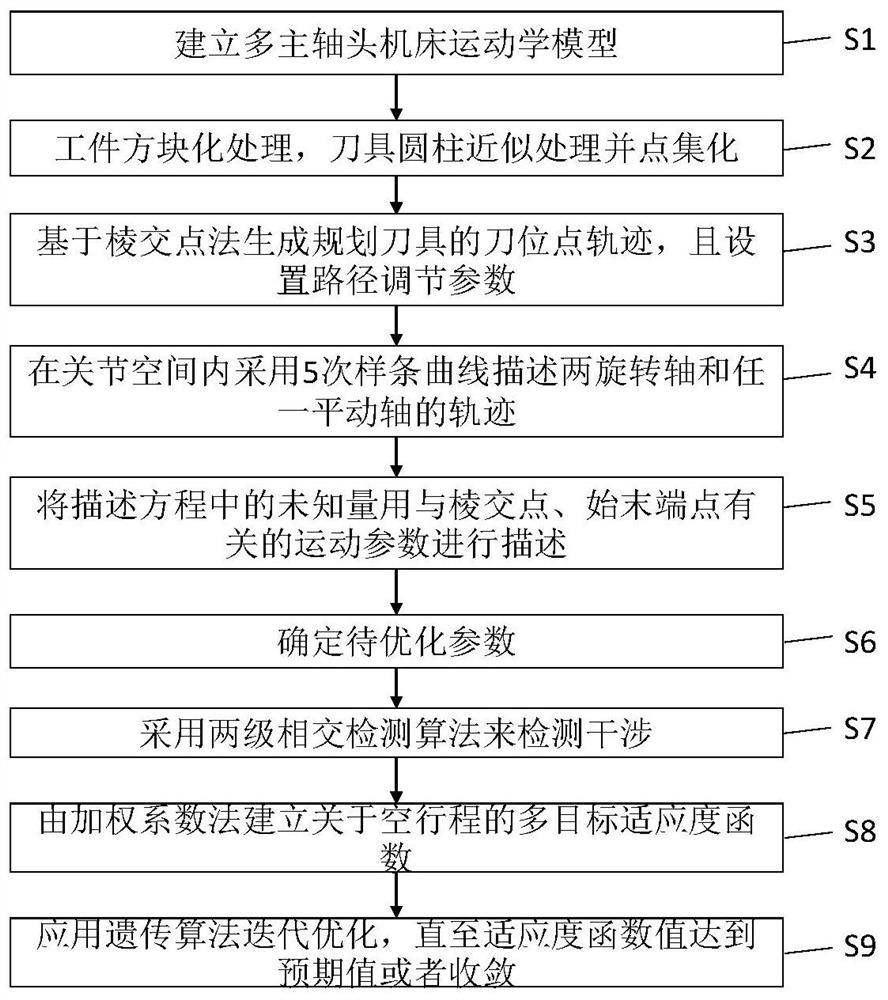
[0067] Such as figure 1 As shown, the preferred embodiment of the present invention discloses a non-interference trajectory planning method for idle travel in multi-spindle head machining, including the following steps:
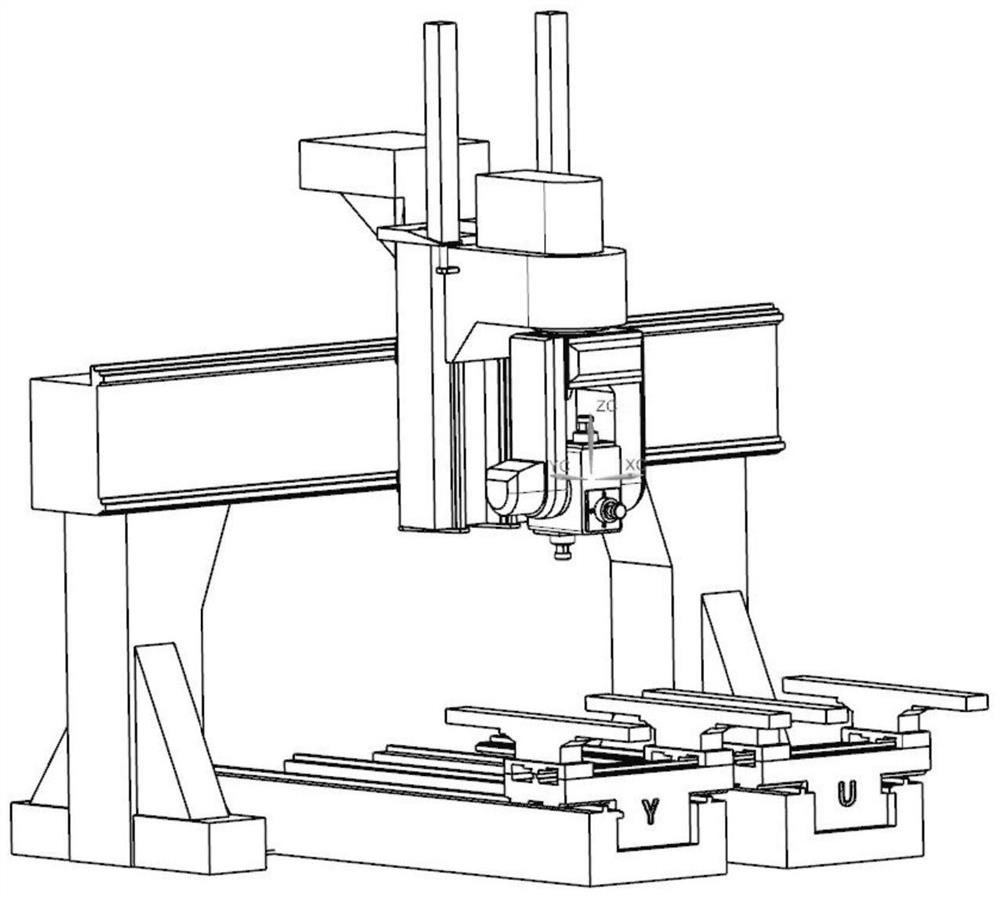
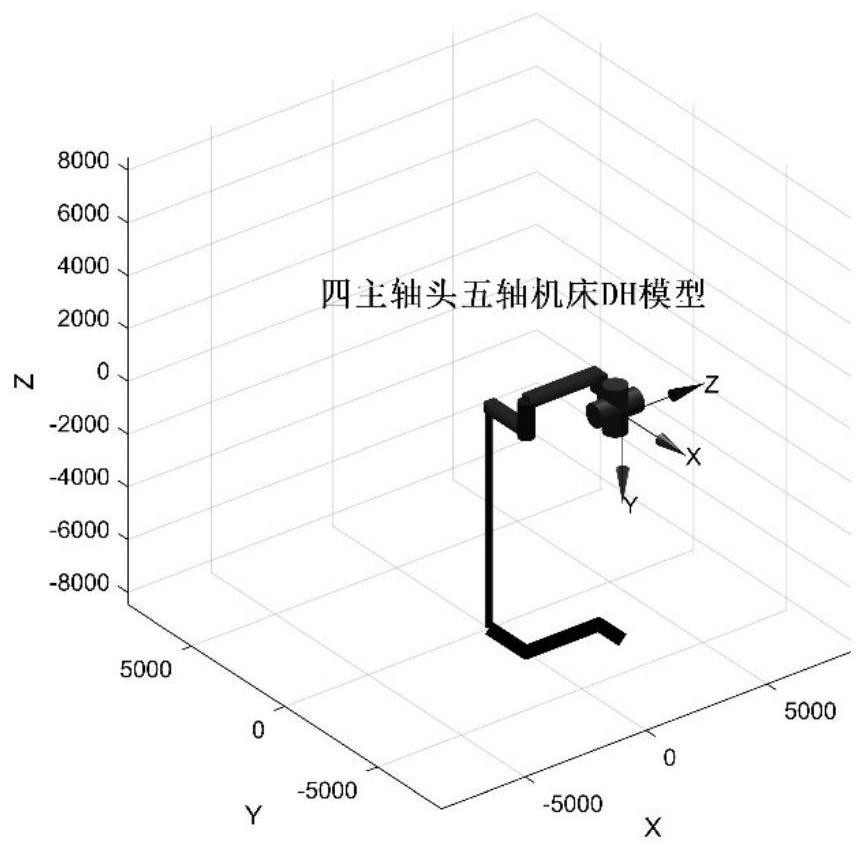
[0068] S1: Put the multi-spindle head machine tool (such as figure 2 As shown), the structure is analogous to the series open-chain structure of the manipulator, and the kinematics model of the multi-spindle head machine tool is established by the Modified D-H (Denavit-Hartenberg) method, and the DH model is obtained (see Table 1 for the parameters). The model framework is as follows image 3 shown.
[0069] Table 1 Modified DH parameter list of multi-spindle head machine tool
[0070]
[0071] q in the table 1 ,q 2 ,q 3 Respectively represent the linear displacement along the Y axis, X axis and Z ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More