

Rapidly-exploring random tree-based planning method for route of unmanned aerial vehicle
A random tree and machine route technology, applied in the direction of mechanical equipment, combustion engines, navigation calculation tools, etc., to achieve the effect of increasing speed, increasing expansion speed, convergence speed and planning speed optimization
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0032] Now in conjunction with embodiment, accompanying drawing, the present invention will be further described:
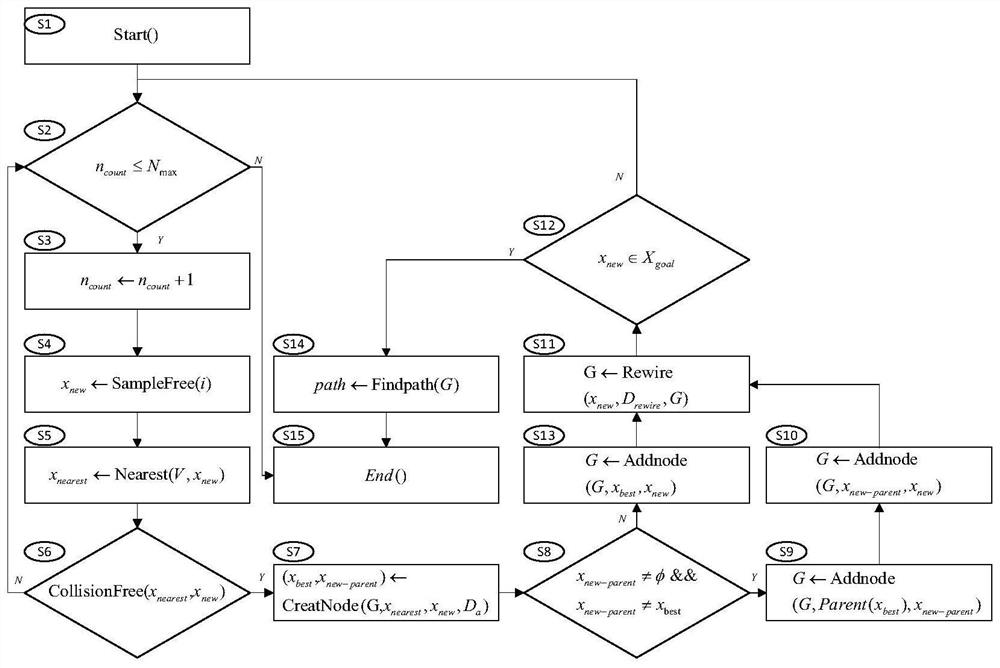
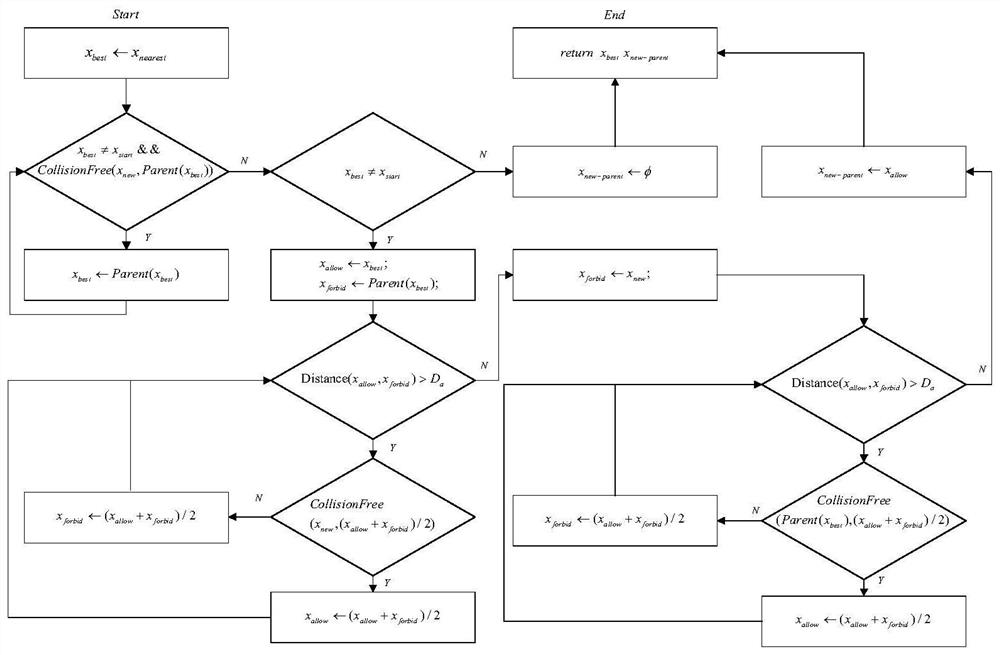
[0033] The present invention is a path planning scheme, and it is named Fast-RRT* (F-RRT*), the F-RRT* algorithm is an improved version of the RRT* algorithm, the main improvement lies in how new points are added to the random tree, The algorithm as a whole can be divided into 15 steps, corresponding to figure 1 In the flow chart shown, the rectangles in the flow chart represent the execution steps, and the diamonds represent the judgment steps, and the function or variable processing process in the flow chart is the name or content corresponding to the steps. The specific steps of the algorithm are as follows:
[0034] Step 1: Obtain the required relevant parameters, including: starting point x start , target area X goal , environment X=X obs ∪X free , where X obs is the area where the obstacle is located, X free is an obstacle-free area, so there is X o...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More