

Puncture control method of puncture robot
A control method and robot technology, applied in the field of medical devices, can solve the problems of patient discomfort, repeated trauma to patients, etc., and achieve the effects of reducing the number of traumas, improving the success rate of puncture, and avoiding deviations.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
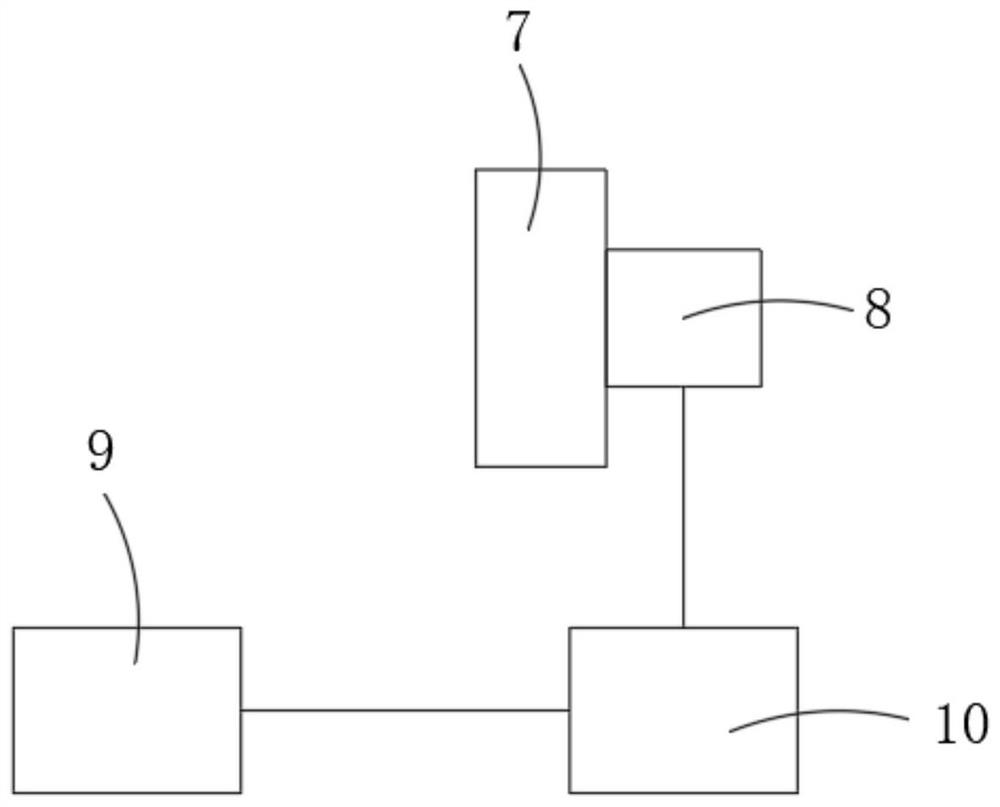
[0025] Such as Figure 1-3 As shown, the embodiment of the present invention provides a puncture control method for a puncture robot, including a robot body 7, a needle sending mechanical assembly 8, a PCS system 9, and a PLC control system 10, and is characterized in that: the needle sending mechanical assembly 8 is fixedly connected to the robot body 7, The PCS system 9 is connected to the PLC control system 10, and the PLC control system 10 is connected to the needle sending mechanical assembly 8;
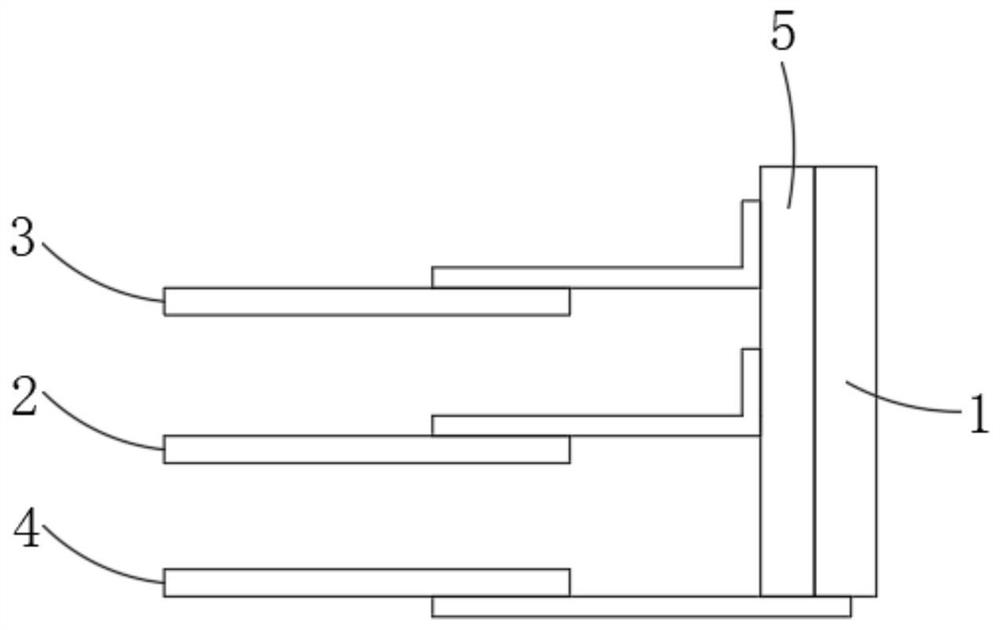
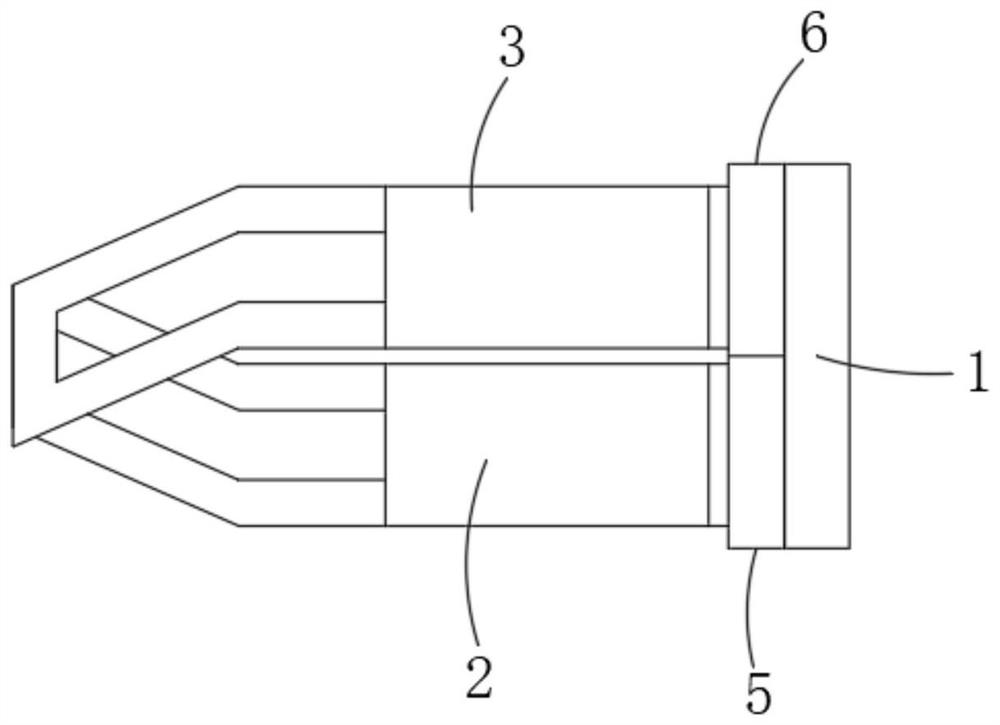
[0026] The needle sending mechanical assembly 8 includes a fixed base plate 1, the bottom of which is fixedly installed with a puncture needle guiding and clamping mechanism 4, and the side wall of the fixed base plate 1 is fixedly connected with a first reciprocating mechanism 5 and a second reciprocating mechanism 6, the second A reciprocating mechanism 5 is fixedly connected with a needle sending and clamping mechanism 2, and a second reciprocating mechanism 6 is fixedly conn...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More