

Lower limb rehabilitation robot based mirror training method for lower limb rehabilitation
A rehabilitation robot and training method technology, applied in the field of medical rehabilitation, can solve the problem of inaccurate mirror position, and achieve the effect of avoiding the influence of precision
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
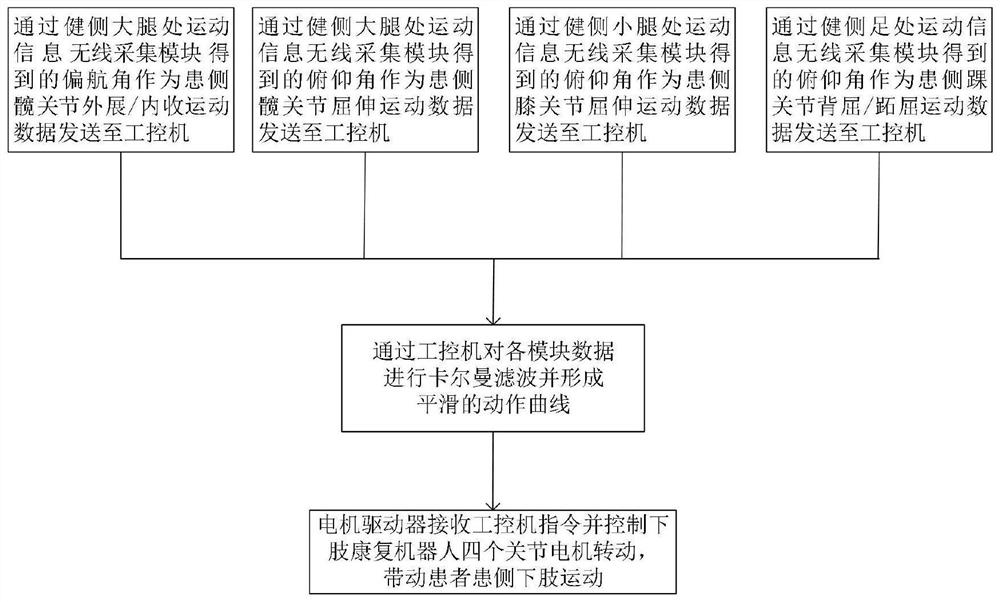
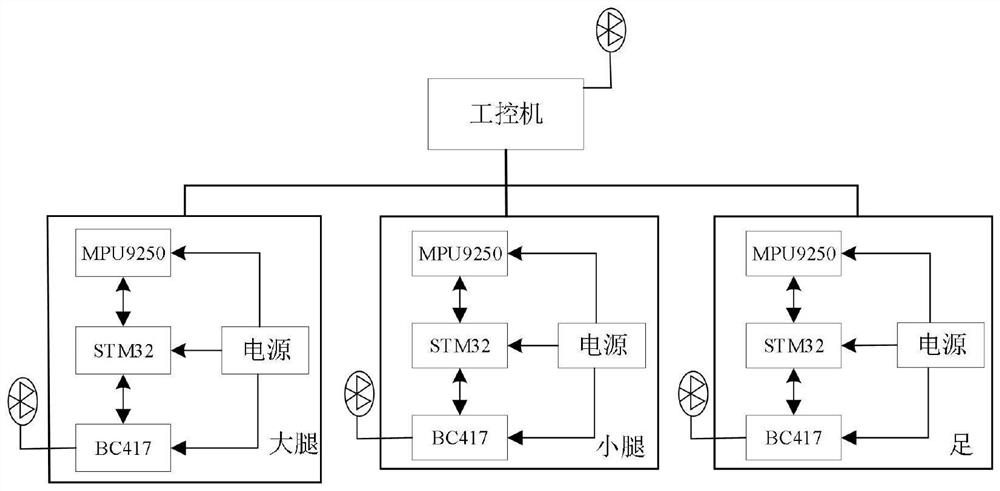
[0031] In this embodiment, a lower limb rehabilitation robot-based mirror image training method for lower limb rehabilitation is that when the healthy side of the patient moves, the lower limb rehabilitation robot processes the motion information of the affected side, eliminates the extra torque generated by the patient on the machine, and drives each joint The motor rotates to achieve the purpose of mirror motion. Specifically, the method is applied in a system composed of a wireless acquisition module for lower limb motion information on the healthy side, a lower limb rehabilitation robot, a motion control module, and an industrial computer; among them, the lower limb rehabilitation robot is used as shown in CN201910406304.0. Drive the patient's lower limbs to move; the motion control device includes motors and motor drivers installed on the four joints of the lower limb rehabilitation robot, which are used to control the rotation of the lower limb joints of the robot and det...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More