

Robot calibration system, two-dimensional plane motion calibration method and three-dimensional space motion calibration method
A technology for calibrating systems and robots, applied in the field of robotics
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
[0190] In this embodiment, taking the prism assembly 31 as a double prism as an example, the two-dimensional plane motion calibration method of the system is as follows:
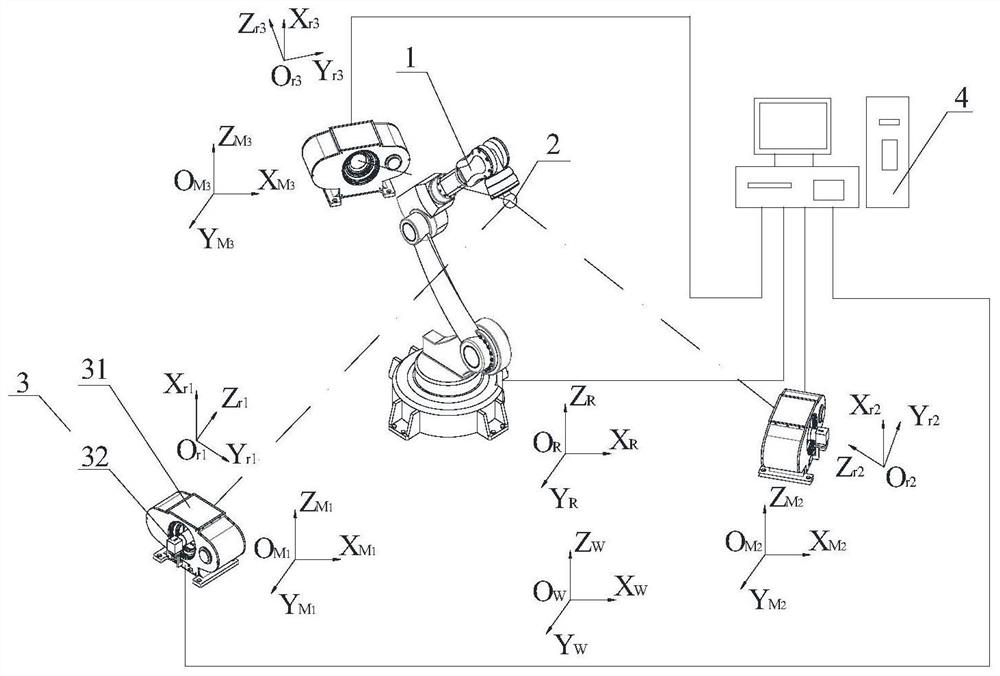
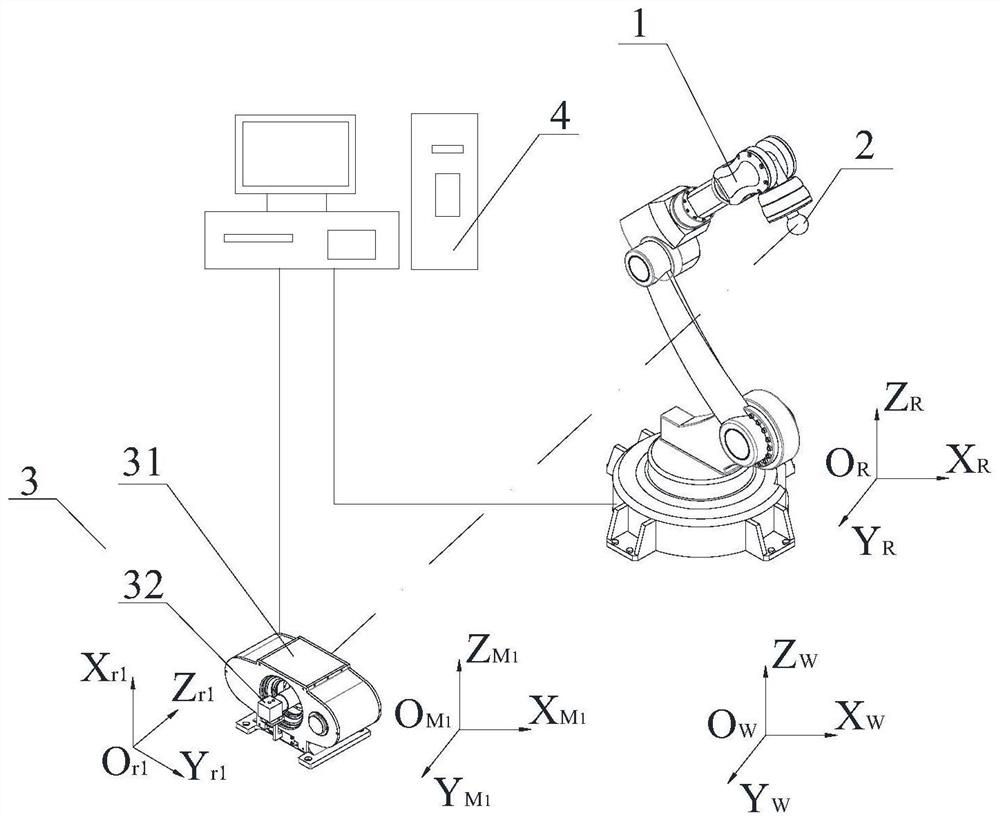
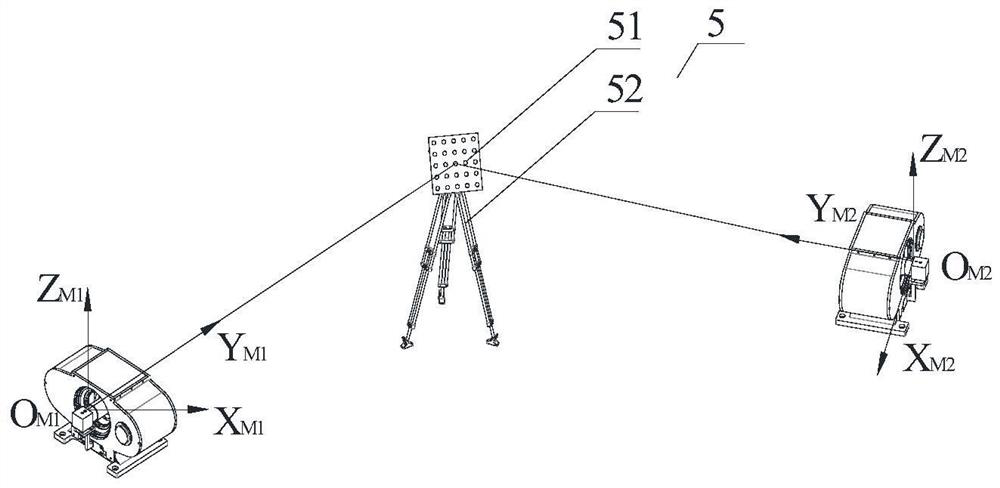
[0191] a1. Establish the world coordinate system O w -X w Y w Z w , establish the robot coordinate system O R -X R Y R Z R , establish the measurement component coordinate system O M -X M Y M Z M , establish the coordinate system O of the prism component in the measurement component 3 r -X r Y r Z r , set up the camera coordinate system O matched with the prism assembly 31 c -X c Y c Z c , will measure the component coordinate system O M -X M Y M Z M , the world coordinate system O w -X w Y w Z w And the camera coordinate system O matched with the measurement component 3 c -X c Y c Z c ;
[0192] a2. The host computer 4 controls the prism assembly 31 of the measurement assembly 3, so that the visual axis of the camera 32 passes through the prism assembly 31 without deflection, a...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More