Weight-bearing soft body bionic finger and production technology thereof
A manufacturing process and finger technology, applied in the field of bionic robots, can solve problems such as affecting the effective service life of soft bionic fingers, easy elongation and deformation, and restrictions on the application of soft bionic fingers.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
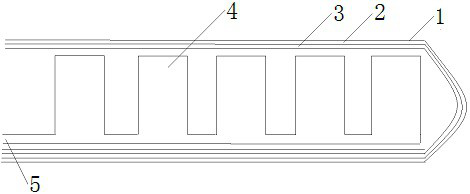
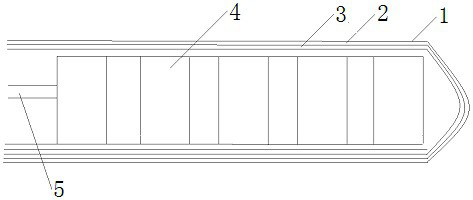
[0039] see Figure 1 to Figure 4 , the load-bearing soft bionic finger of this embodiment includes a skin glue layer 1 , a negative Poisson's ratio knitted layer 2 , a silicon-based resin layer 3 and an air cavity 4 .
[0040] The skin glue layer 1 of this embodiment is the outermost layer of the bionic finger, which is made of a silicone-based resin material with a Shore hardness of 10HA and a Young's modulus of elasticity of 152Ka. It has the characteristics of high hardness and high elasticity to enhance bionic The touch and wear resistance of the fingers, prolonging the service life, the skin glue layer 1 is in the shape of a cylinder with one end closed, similar to the shape of a human finger, the negative Poisson’s ratio knitted layer 2 and the silicone-based resin layer 3 are located on the skin glue layer 1 internal.
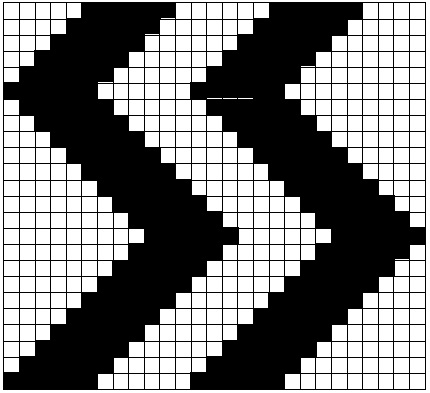
[0041] Such as image 3 and Figure 4 As shown, the negative Poisson's ratio knitting layer 2 of the present embodiment is woven by carbon fiber, gla...
Embodiment 2
[0058] The content of this embodiment is basically the same as that of Embodiment 1, and the content of the same part will not be repeated. The difference from Embodiment 1 is that the negative Poisson’s ratio knitted layer 2 and the silicone-based resin layer 3 of this embodiment are molded. The composite structure adopts a 1+2 composite structure, that is, it includes a layer of negative Poisson's ratio knitted layer 2, a layer of silicone-based resin layer 3 and a layer of negative Poisson's ratio knitted layer 2 from the outside to the inside, and the hardness of the bionic finger formed is Both the degree of deformation and the degree of deformation are improved compared with the first embodiment.
[0059] Correspondingly, in the third step of the manufacturing process, the specific operation steps of molding the composite structure of the negative Poisson's ratio knitted layer 2 and the silicone-based resin layer 3 become: laying a layer of negative Poisson's ratio knitte...
Embodiment 3
[0061] The content of this embodiment is basically the same as that of Embodiment 1, and the content of the same part will not be repeated. The difference from Embodiment 1 is that the negative Poisson’s ratio knitted layer 2 and the silicone-based resin layer 3 of this embodiment are molded. The composite structure adopts a 2+2 type composite structure, that is, it includes a negative Poisson's ratio knitted layer 2, a silicone-based resin layer 3, a negative Poisson's ratio knitted layer 2 and a silicone-based resin layer from outside to inside. 3. The hardness and deformation degree of the formed bionic finger are significantly improved compared with the first embodiment.
[0062] Correspondingly, in the third step of the manufacturing process, the specific operation steps of molding the composite structure of the negative Poisson's ratio knitted layer 2 and the silicone-based resin layer 3 become: laying a layer of negative Poisson's ratio knitted layer 2 in the upper mold,...
PUM
| Property | Measurement | Unit |
|---|---|---|
| Shore hardness | aaaaa | aaaaa |
Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com