

Motion model driving method based on four elements
A motion model and driving method technology, applied in simulators, instruments, control/regulation systems, etc., can solve the problems of short solution step length, high running frequency of simulation system, and high occupancy rate of computing resources
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0084] The present invention will be further described below in conjunction with the accompanying drawings and embodiments.
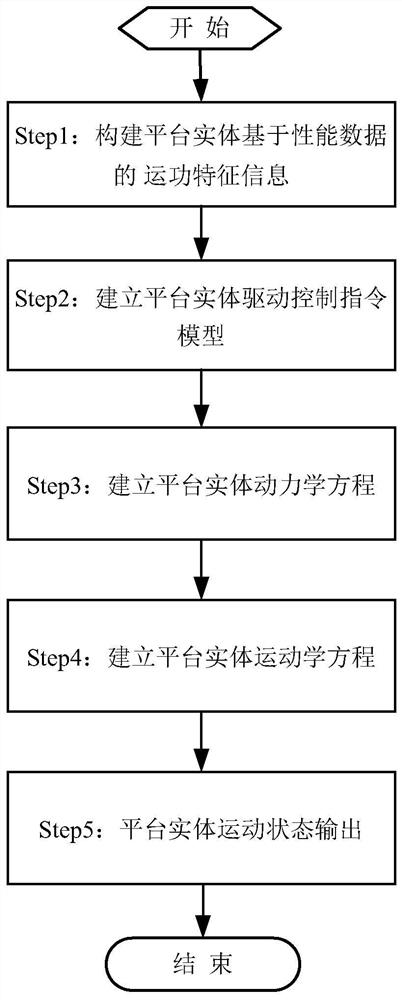
[0085] Based on the four-element motion model-driven method, the simulation of the platform entity motion is realized using the performance data and the three-degree-of-freedom dynamics method. The flow chart of the present invention is as figure 1 shown.
[0086] The present invention realizes steps as follows:
[0087] Step 1: Describe the motion characteristics of the physical platform. The description method is based on the description method of performance data, which requires about twenty data;
[0088] Step 2: Establish the physical platform motion model. The motion model of the solid platform is a three-degree-of-freedom particle motion model, including dynamic equations and kinematic equations, and the kinematic equations also include longitude and latitude equations;
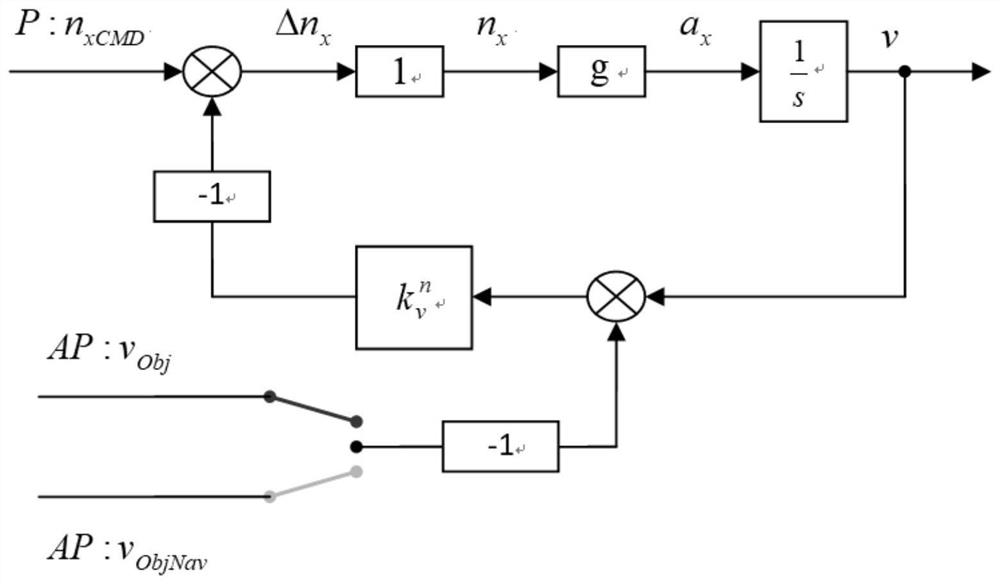
[0089] Step 3: Realize the basic controller of the physical platform....
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More