

End effector of a fruit picking robot
A picking robot and end effector technology, applied in picking machines, manipulators, harvesters, etc., can solve the problems of inability to adjust the execution time point, poor adaptive ability of fruit shape, fruit body damage, etc., to reduce space, reduce Space, the effect of reducing the difficulty of control
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0037] The present invention is described in further detail below in conjunction with the accompanying drawings and embodiments.
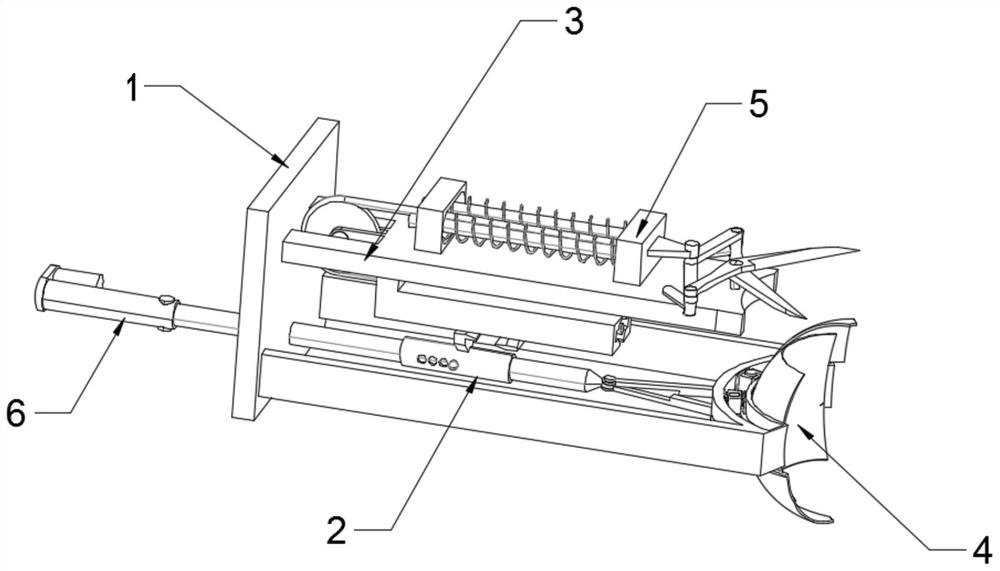
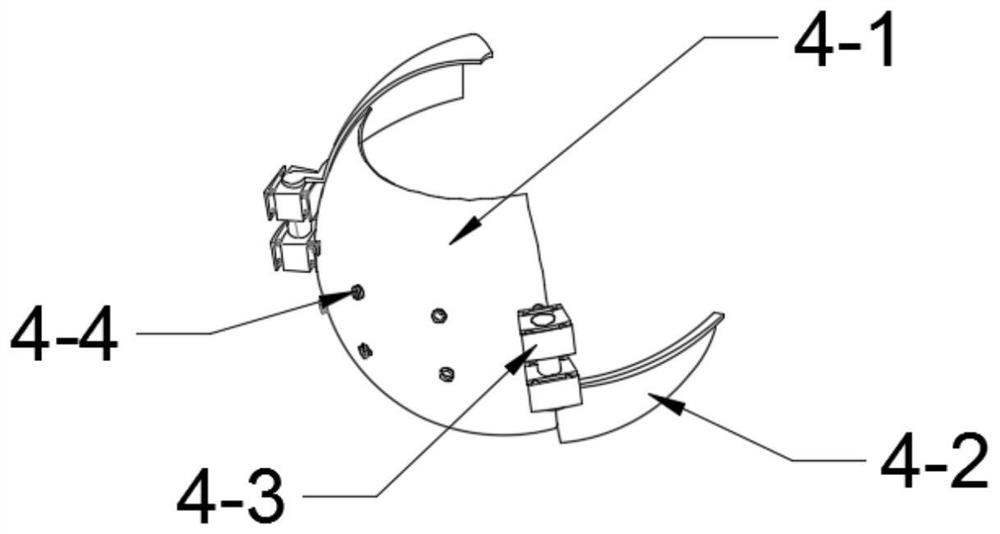
[0038] as Figures 1 through 10 A melon and fruit picking robot end effector shown, wherein: a melon and fruit picking robot end effector, wherein: comprising: rear support plate 1, electric push rod 6, electric push rod transmission mechanism 2, clamping mechanism 4, delay mechanism 3 and shear mechanism 5;
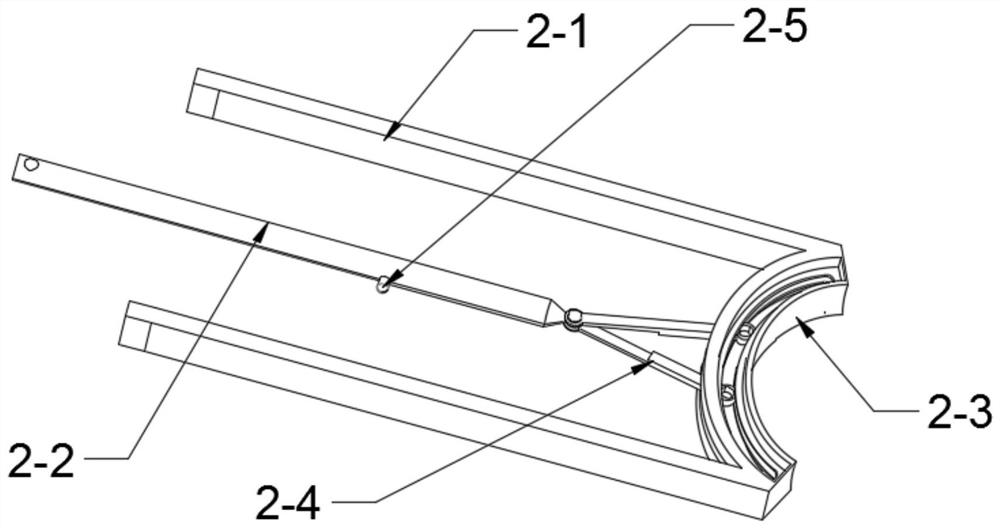
[0039]The rear support plate 1 vertical setting, the electric pushrod 6 horizontally is located in the lower left wall of the rear support plate 1, the electric pushrod transmission mechanism 2 horizontally located in the lower right side of the rear support plate 1, the delay mechanism 3 horizontally located in the upper right side of the rear support plate 1; the electric pushrod transmission mechanism 2 left end is connected to the lower right side of the rear support plate 1, the clamping mechanism 4 is installed in the electric pushrod trans...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More