

Mars star catalogue low-altitude throwing robot and control method thereof
A control method and robot technology, applied in the direction of adaptive control, general control system, control/adjustment system, etc., can solve the problems that the robot's mobile mechanism is not strong enough to pass through road obstacles, etc., so as to facilitate parallel processing and facilitate failure Detection and exclusion, the effect of expanding the scope of the survey
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0096] In order to make the object, technical solution and advantages of the present invention more clear, the present invention will be further described in detail below in conjunction with the examples. It should be understood that the specific embodiments described here are only used to explain the present invention, not to limit the present invention.
[0097] Aiming at the problems existing in the prior art, the present invention provides a Mars surface low-altitude throwing robot and its control method. The present invention will be described in detail below in conjunction with the accompanying drawings and specific embodiments.
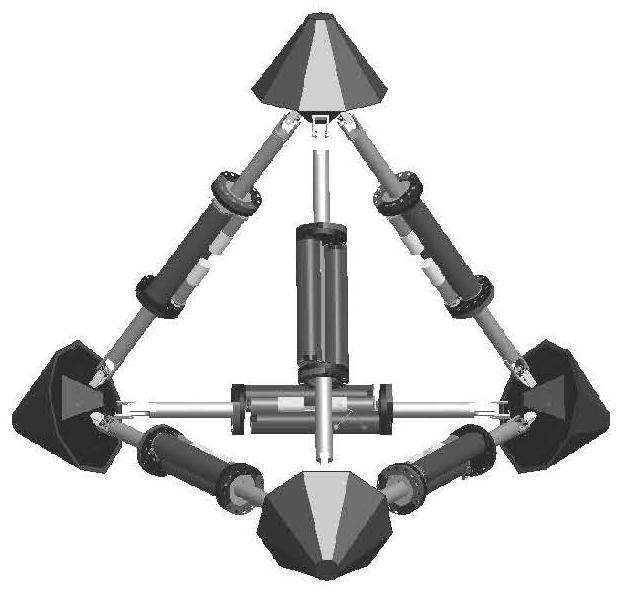
[0098] Considering the mass limitation of the launch vehicle, it is proposed to use a heavy tetrahedron detection robot (such as figure 1 shown) scheme.
[0099] The tetrahedron structure is a redundant or even super-redundant variable geometry truss structure with high overall rigidity, which is easy to improve the drop resistance and load-c...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More