

Multi-agent cluster grouping time-varying formation tracking control method and system
A multi-agent, tracking control technology, applied in control/regulation systems, non-electric variable control, two-dimensional position/channel control, etc., can solve problems such as lack of functional design in grouping
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
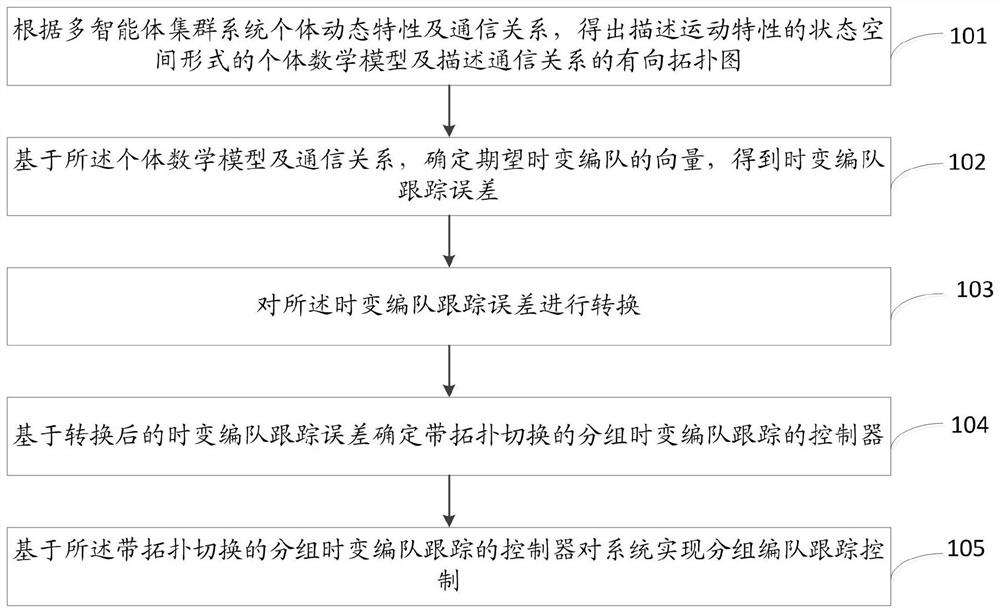
[0147] The effectiveness of the method proposed by the present invention is verified below through a specific example of grouping time-varying formation encirclement tracking control of a multi-agent swarm system. The specific implementation steps of this example are as follows:
[0148] (1) Multi-agent cluster system setup
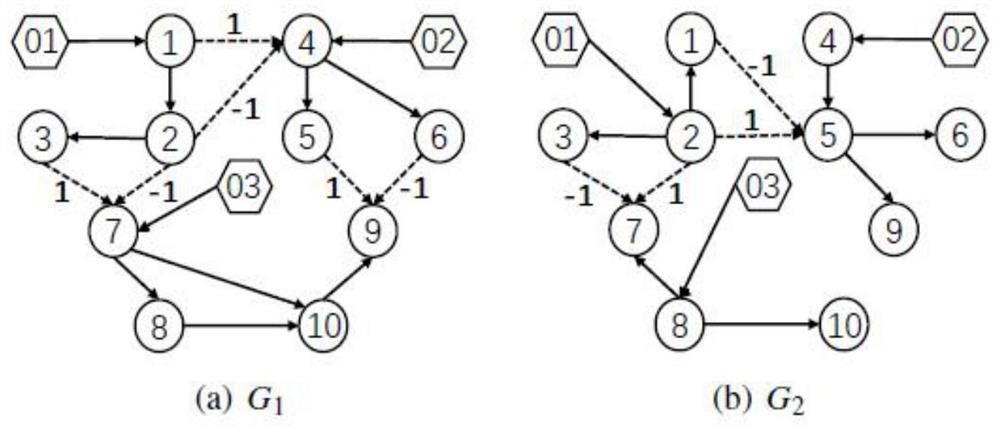
[0149] Consider a third-order multi-agent system divided into 3 subgroups with a total of 13 agents. The topology of its switching is as follows figure 2 shown. The follower's node set is partitioned into V 1 ={1,2,3},V 2 = {4,5,6} and V 3 ={7,8,9,10}. The model parameters are set to:
[0150]
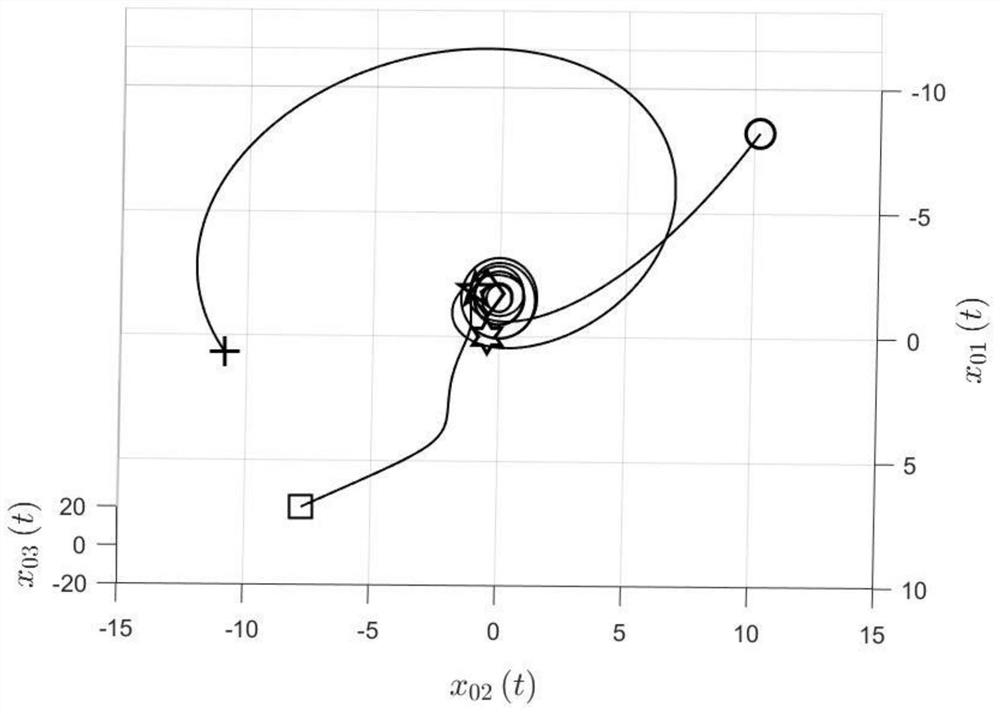
[0151] (2) Expected time-varying formation design
[0152] To describe the desired rotating circular formation configuration, the design formation reference vector is as follows
[0153]
[0154]
[0155] It can be verified that the time-varying formation feasibility condition is satisfied.
[0156] (3) Parameter design of formation tracking co...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More