

Speed constraint tracking control method for service robots suitable for different users
A service robot and tracking control technology, applied in two-dimensional position/course control, vehicle position/route/height control, non-electric variable control, etc. issues such as patient safety
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0167] A speed-constrained tracking control method for service robots suitable for different users,
[0168] The method steps are as follows:
[0169] 1), according to the dynamic model of the service robot, the coefficient matrix M 0 The trainer's quality m is decomposed into a constant value and a random variable, and a stochastic differential equation describing the quality change of different users is established;
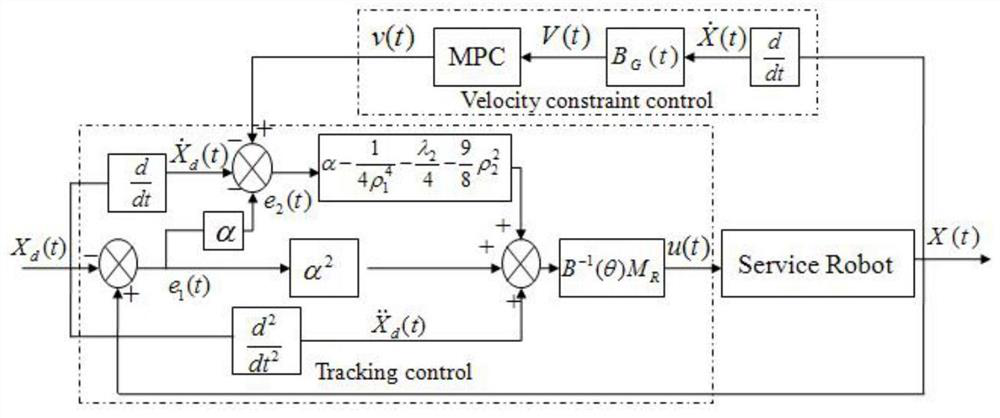
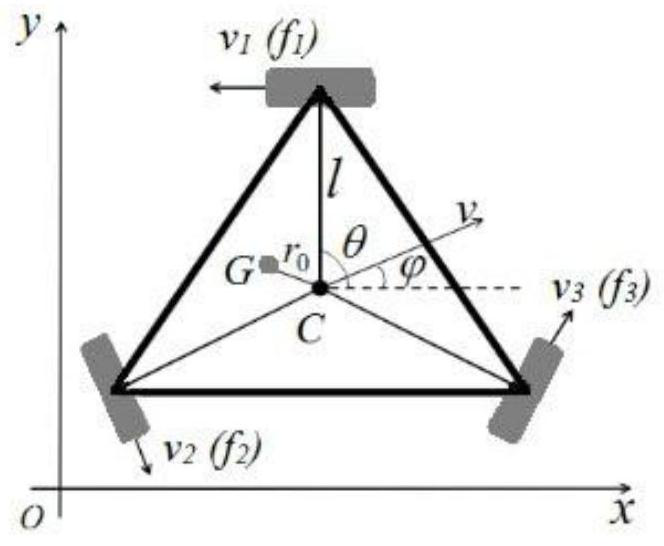
[0170] 2) Based on the kinematics model of the service robot, a model predictive control method is proposed to control the movement speed of each wheel, and then the robot is constrained in the x-axis, y Movement speed in axis and direction of rotation angle
[0171] 3) Using the constrained motion speed in step 2) combined with the stochastic differential equation in step 1), a tracking error system is established, and based on the stochastic Lyapunov stability theory, an exponential stability condition for the tracking error system is constructed to achie...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More