

UWB/MEMS combination-based UWB base station position error compensation method
An error compensation and base station technology, which is applied in the field of UWB base station position error compensation based on UWB/MEMS combination, can solve the problems of being easily affected by the environment, difficult to measure accurately, and the accuracy of UWB base station position measurement has errors.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
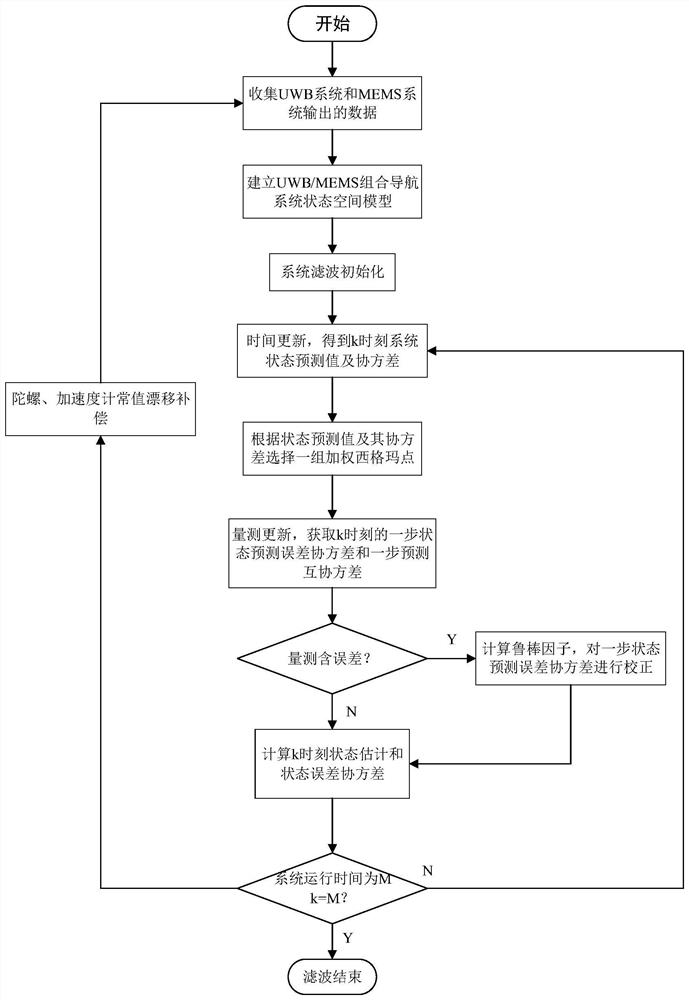
[0090] DETAILED DESCRIPTION figure 1 In particular, the present invention is the present invention as a UWB base station position error compensation method based on the UWB / MEMS combination. figure 1 As shown, including the following steps:
[0091] (1) Collect data from the UWB system and MEMS system;
[0092] (2) Select the status quantity and observations, establish a UWB / MEMS combination navigation system status space model;
[0093] (3) UWB / MEMS combination filter system initialization;
[0094] (4) time to update. The status prediction value and covariance of the K-1 time state estimation value and covariance are calculated by the K-1 hour.
[0095] (5) Sigma point selection. Select a set of weighted SIGMA points based on the status prediction value and its covariance;
[0096] (6) Measurement update. Measurement was carried out using Sigma updated after the point of measurement equation nonlinear transformation, the state estimate at time k and covariance, estimated c...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More