

Unmanned aerial vehicle image rapid three-dimensional reconstruction method for field unknown environment
An unknown environment and 3D reconstruction technology, applied in the field of rapid 3D reconstruction of UAV images, can solve the problems of high image resolution, inability to achieve fast reconstruction or even real-time reconstruction, and inability to meet fast reconstruction, so as to improve grid quality and enhance The effect of 3D reconstruction details
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
[0084] Embodiment: A method for fast 3D reconstruction of UAV images in an unknown environment in the field
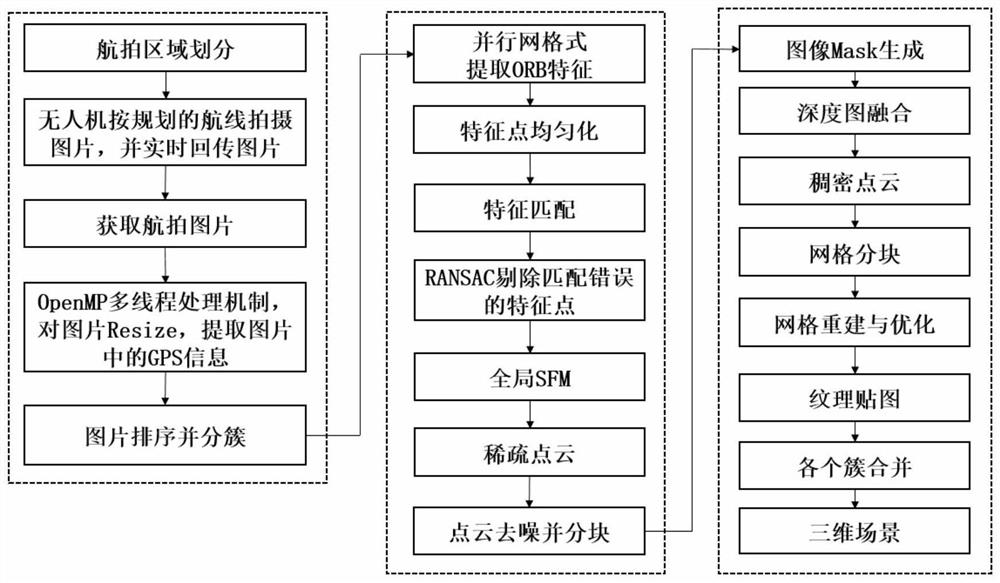
[0085] figure 1 A flow chart of a method for rapid 3D reconstruction of UAV images for unknown field environments is given. This embodiment discloses a method for rapid three-dimensional reconstruction of UAV images facing unknown environments in the field, including the following steps:
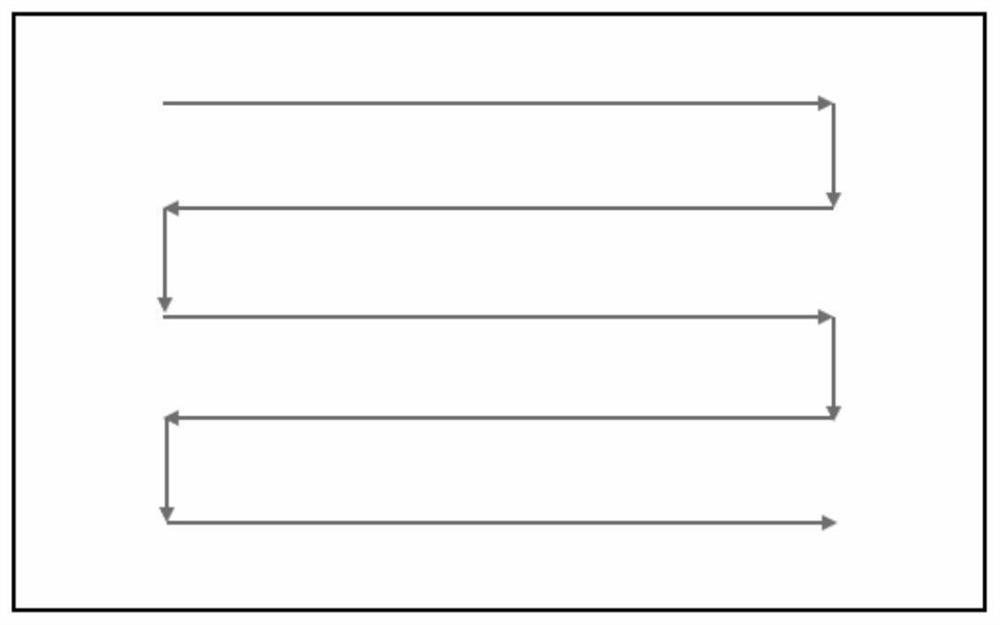
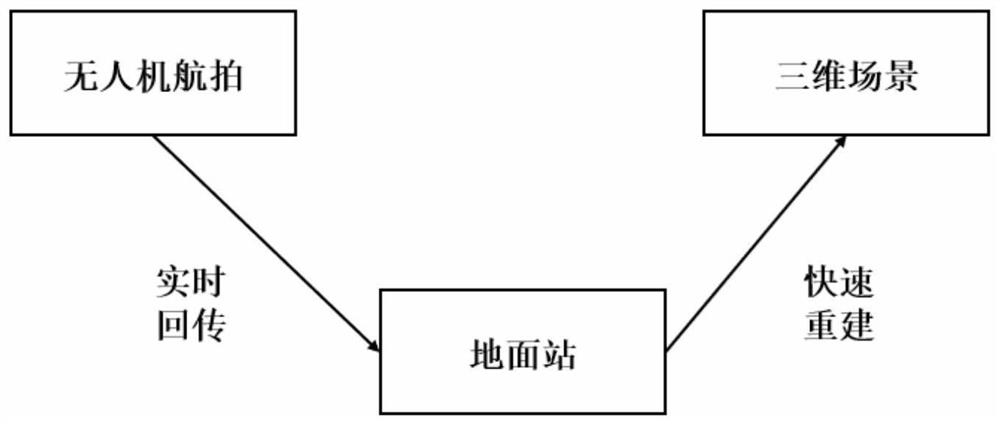
[0086] S1, first divide the aerial photography area through the ground station of the UAV, and plan the flight path of the UAV in a zigzag shape. The single camera carried by the drone shoots the monocular vision image sequence of the scene to be reconstructed, and the UAV sends back the captured pictures and RTK information to the UAV ground station in real time during the process of taking images;
[0087] S2. After receiving the picture taken by the drone, the UAV ground station adopts the OpenMP multi-thread processing mechanism to scale the picture and extract the GPS informat...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More