

Method for guiding robot to suck buzzers for dust removal
A robot and buzzer technology, which is applied to the cleaning methods, chemical instruments and methods, cleaning methods and utensils using gas flow, etc. Improved assembly efficiency and high alignment accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0015] The present invention is described in further detail now in conjunction with accompanying drawing. These drawings are all simplified schematic diagrams, which only illustrate the basic structure of the present invention in a schematic manner, so they only show the configurations related to the present invention.
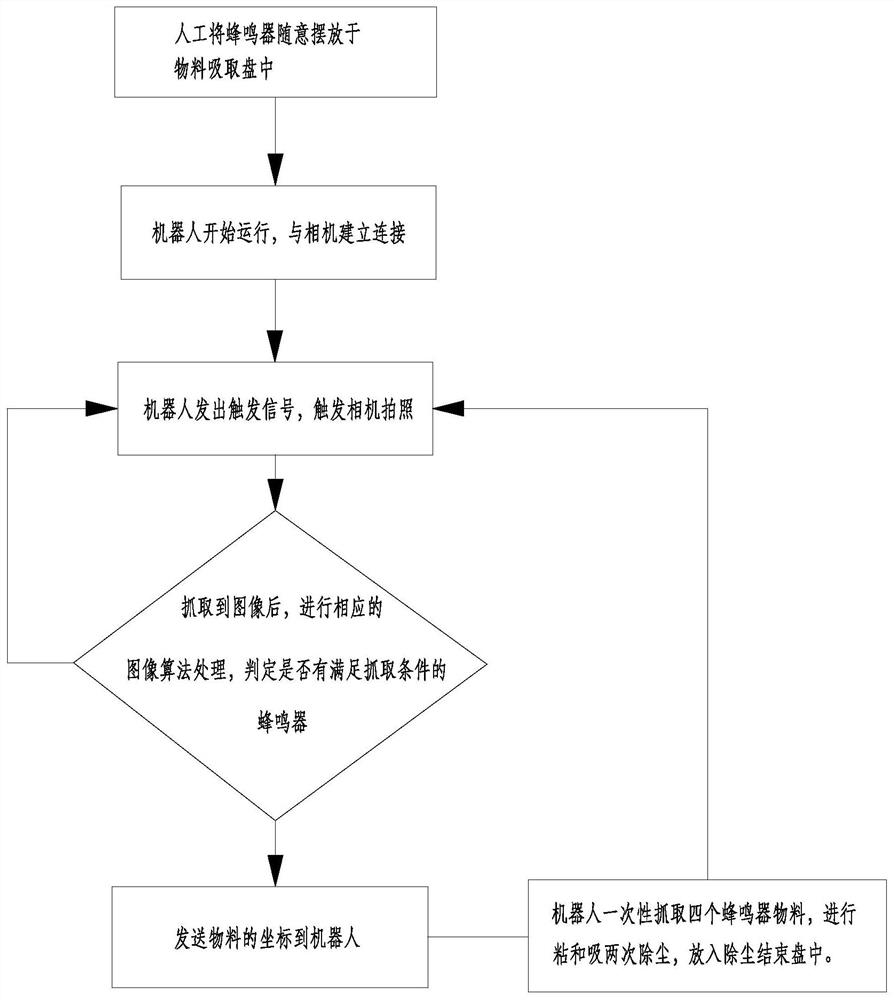
[0016] Such as figure 1 Shown, a kind of method for guiding robot suction buzzer to carry out dust removal has the following steps:
[0017] S1: Manually place the buzzer in the material suction tray; more than 120pcs of material can be put in at one time, and the robot will start the running program and establish a Socket communication connection with the camera;
[0018] S2: The robot starts to run and establishes a communication connection with the camera; the robot sends a fixed camera command through Socket communication to trigger the camera to take pictures.
[0019] The above-mentioned camera is fixedly installed above the suction plate, and the phot...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More