

Unmanned aerial vehicle control method based on gesture recognition and gesture recognition remote control unmanned aerial vehicle
A gesture recognition and control method technology, applied in the field of unmanned aerial vehicles, can solve the problems of short sensing distance, small sensing range, weak obstacle avoidance function, etc., so as to improve the gesture recognition distance, accurate gesture recognition, and strong obstacle avoidance function. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0052] Embodiments of the present invention will be described in detail below.
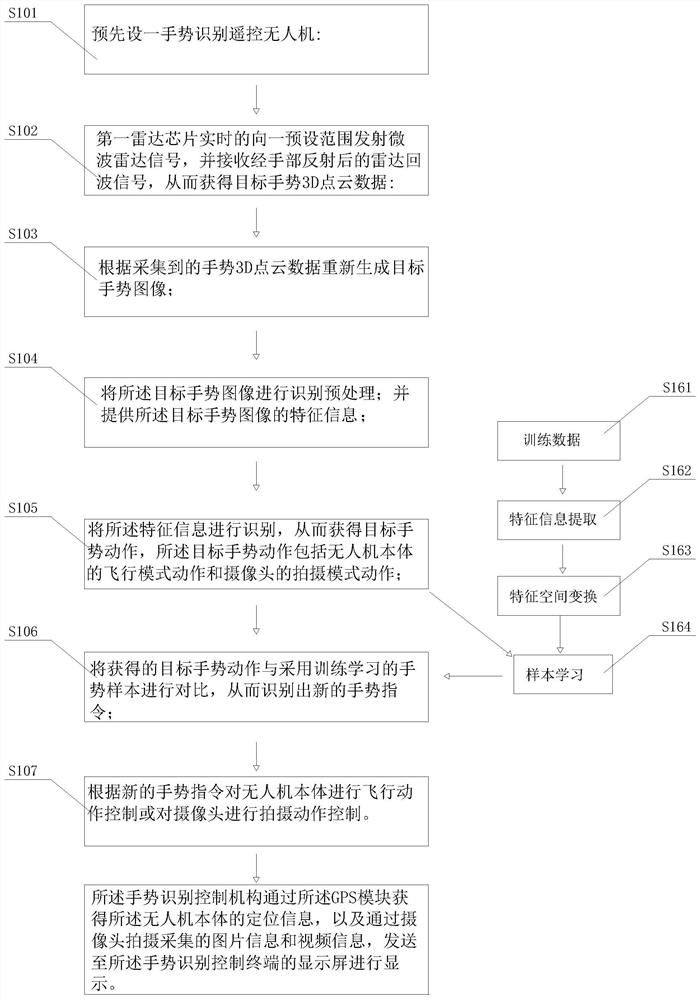
[0053] see figure 1 As shown, the UAV control method based on gesture recognition provided by the present invention comprises the following steps:
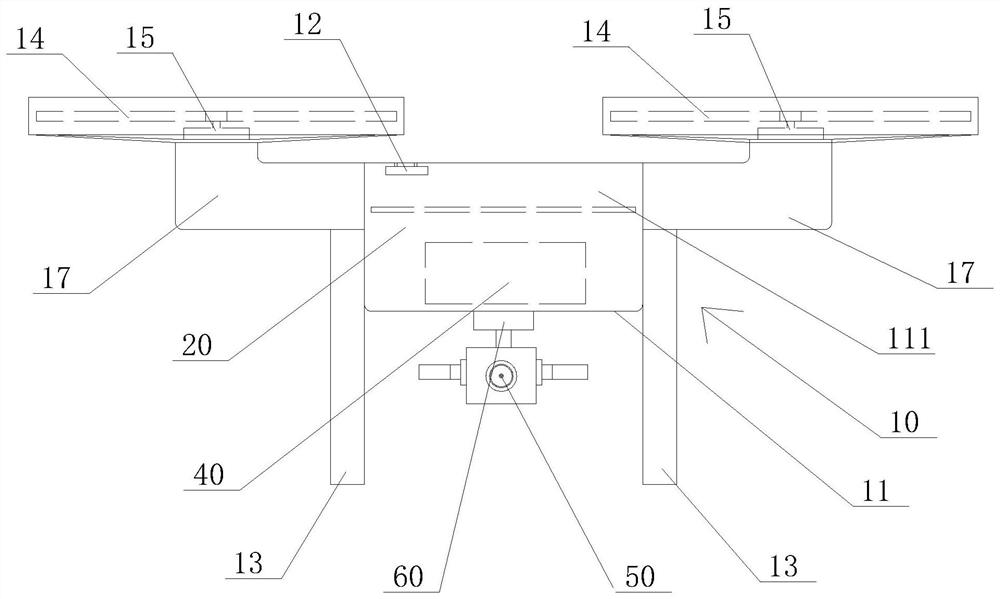
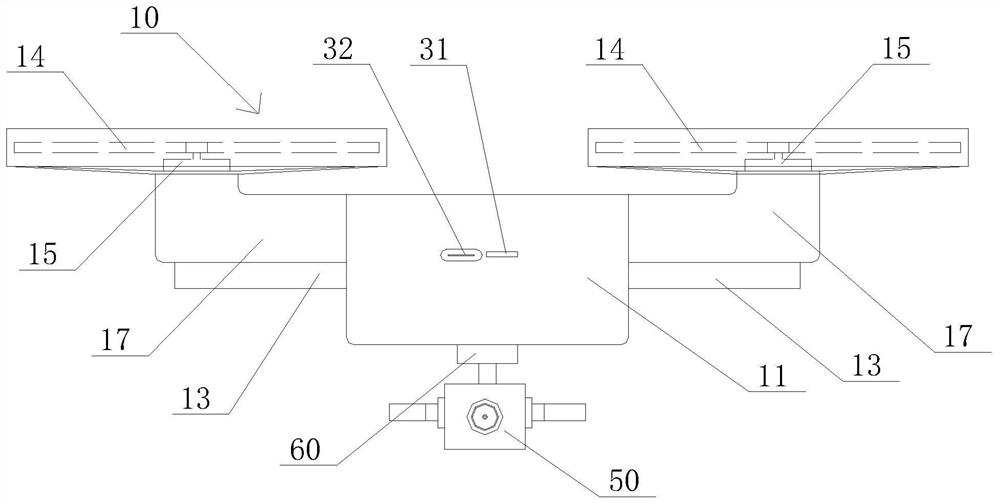
[0054] (1), a gesture recognition remote control drone is preset, the gesture recognition remote control drone includes a drone body 10, a camera 50, a gesture recognition control mechanism 20, and a gesture recognition control machine and a camera 50 are installed on the drone body 10 and electrically connected to the drone body 10, the gesture recognition control mechanism 20 includes a first radar chip 22;
[0055] (2), the gesture recognition control mechanism 20 uses the first radar chip 22 to transmit a microwave radar signal to a preset range in real time, and receives the radar echo signal reflected by the hand, thereby obtaining the target gesture 3D point cloud data, gesture 3D The point cloud data includes the three-dimensional coordinate...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More