Vehicle keyless welcome entry control system and method and vehicle
A technology of a control system and a control method, applied in the field of vehicles, can solve the problems of reduced user experience, inability to accurately determine the key movement trajectory, large static power consumption, etc., so as to improve the reliability and safety of vehicles, improve the sense of technology and intelligence , to achieve the effect of high-precision positioning
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0041] Embodiments of the present invention are described in detail below, and the embodiments described with reference to the drawings are exemplary, and embodiments of the present invention are described in detail below.
[0042] Refer below Figure 1-Figure 7 The vehicle keyless welcome entry control system, method and vehicle according to the embodiments of the present invention are described.
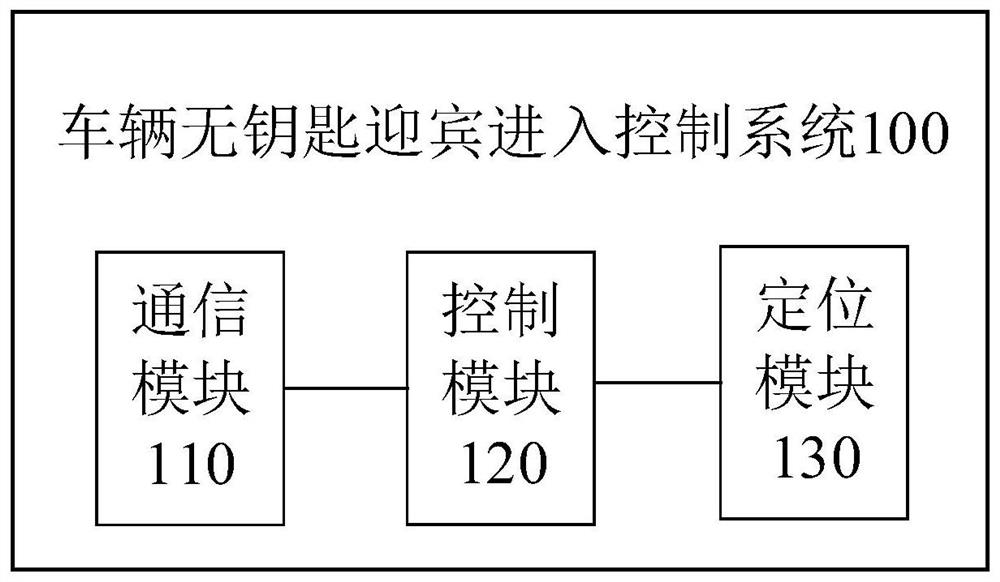
[0043] figure 1 It is a structural schematic diagram of a vehicle keyless welcome entry control system according to an embodiment of the present invention. like figure 1 As shown, the vehicle keyless welcome entry control system 100 includes: a communication module 110 , a control module 120 and a positioning module 130 .
[0044] Wherein, the communication module 110 is used to search for an intelligent terminal with a preset communication mode within its communication range, and send a first instruction when a target intelligent terminal is found.
[0045] Specifically, the c...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More 
PatSnap Eureka turns technology decisions into work you can execute. Powered by our Innovation Knowledge Graph, it runs expert workflows across engineering, life sciences, materials and intellectual property. Get your review-ready output in minutes.



