

A piezoelectric-driven flexible hinge clamping device and control method based on binocular distance measurement
A flexible hinge and binocular ranging technology, which is applied in the direction of measuring device, measuring distance, measuring fluid pressure, etc., can solve the problem of inability to feedback the positional relationship between the clamped object and the gripper, low measurement accuracy and damage of pasted strain gauges. Problems such as the object to be clamped, to achieve the effect of large clamping force, good control accuracy, and good position determination ability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
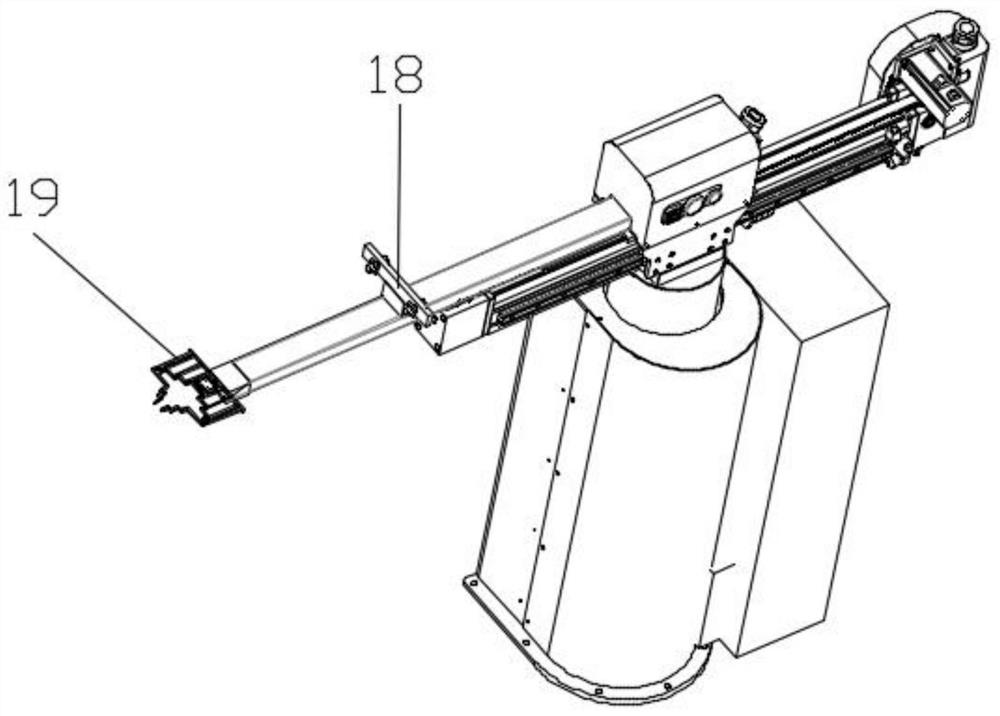
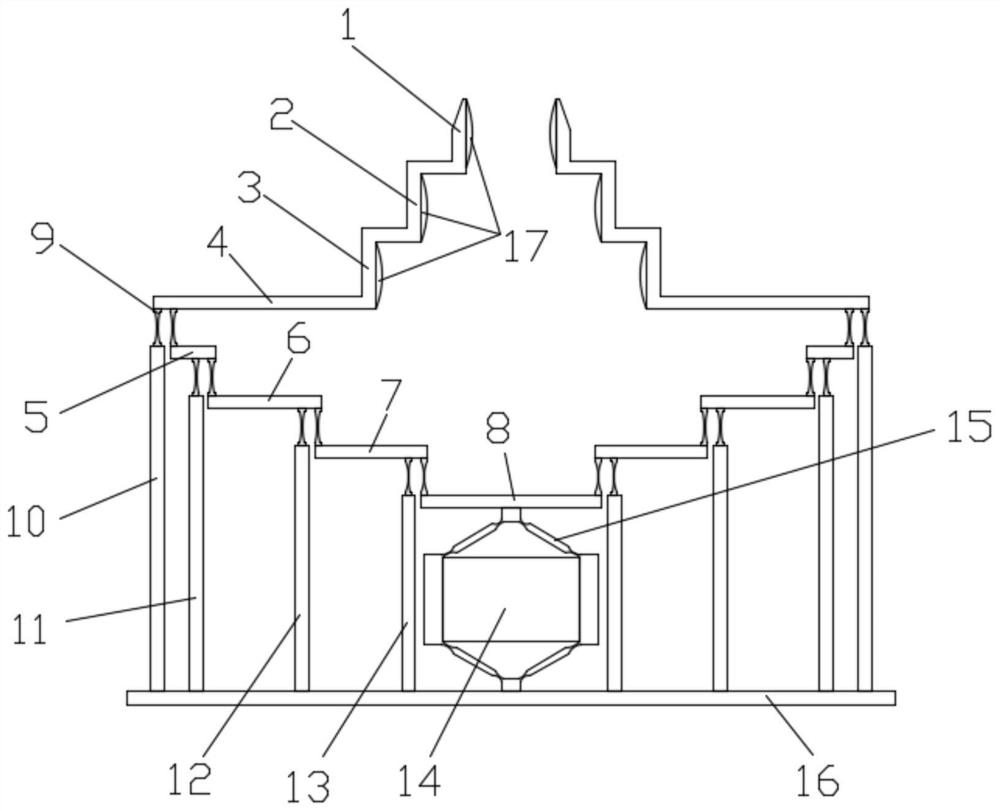
[0044] This embodiment proposes a piezoelectrically driven flexible hinge holder based on binocular distance measurement, refer to figure 1 and figure 2 , comprising a mechanical arm, the mechanical arm is fixed with a binocular camera 18 composed of 2 cameras and a left-right symmetrical flexible hinge holder 19, and the flexible hinge holder 19 is fixed on the front end of the mechanical arm, including a polygonal enlarged structure 15, setting The piezoelectric actuator 14 in the polygonal magnifying structure 15, the four-stage hinge magnifying structure connected with the polygonal magnifying structure 15, and the pincer finger connected with the four-stage hinge magnifying structure, the inner side of the pliers finger is provided with an airbag 17, and the two cameras are left and right symmetrical They are arranged on both sides of the flexible hinge gripper 19 and are used for measuring the relative distance between the pliers fingers and the gripped object. The air...
Embodiment 2
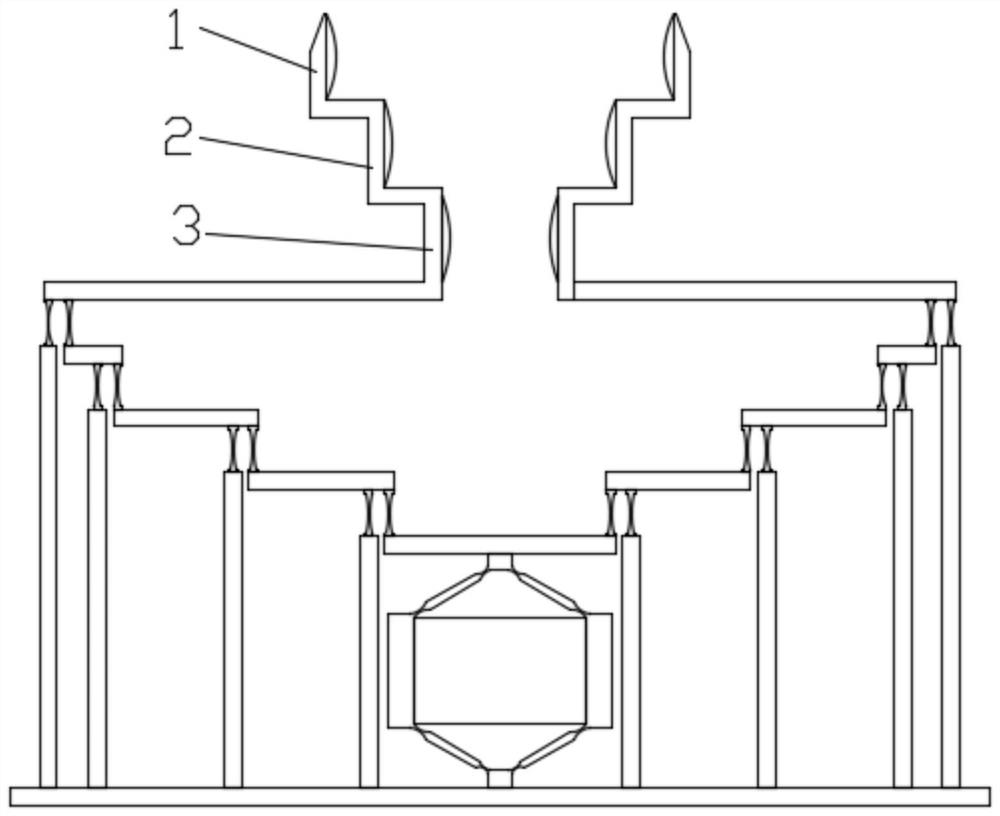
[0083] On the basis of implementation 1, this embodiment refers to image 3 , the first pliers finger 1 is set as a wide opening, the second pliers finger 2 is located in the middle, and the third pliers finger 3 is a narrow opening and is connected with a four-stage hinge enlargement structure. Since the direction of the clamping force generated by the rotation of the hinge is not in the same straight line, the clamping force is at a certain angle. When clamping an object, it tends to move inward. The role of the wide mouth is when clamping a large object. , even if the large object has a tendency to move inward under the action of the clamping force, it will be blocked by the step surface, thereby preventing the large object from sliding.
Embodiment 3
[0085] In this embodiment, on the basis of implementation 1, the length ratios of the rods of the four-stage hinge enlarged structure are limited, and the flexible hinge connected by the first-stage ejector rod 13 is used as a fulcrum to divide the second-stage lever 7 into left and right sections, and the length of the left section is the same as The ratio of the length of the right section is 5:1; the flexible hinge connected by the second-stage ejector rod 12 acts as a fulcrum to divide the third-stage lever 6 into left and right sections, and the ratio of the length of the left section to the length of the right section is 5:1; the third-stage ejector rod The flexible hinge connected with 11 acts as a fulcrum to divide the four-stage lever 5 into left and right sections, and the ratio of the length of the left section to the length of the right section is 1:1; Two sections, the ratio of the length of the left section to the length of the right section is 1:10. The above-me...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More