

Multi-axis robot offline programming method
A multi-axis robot and programming technology, which is applied in the direction of program control of manipulators, manipulators, manufacturing tools, etc., can solve problems such as errors and large operating errors, and achieve the effects of reducing difficulty, small relative errors, and enhancing reliability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
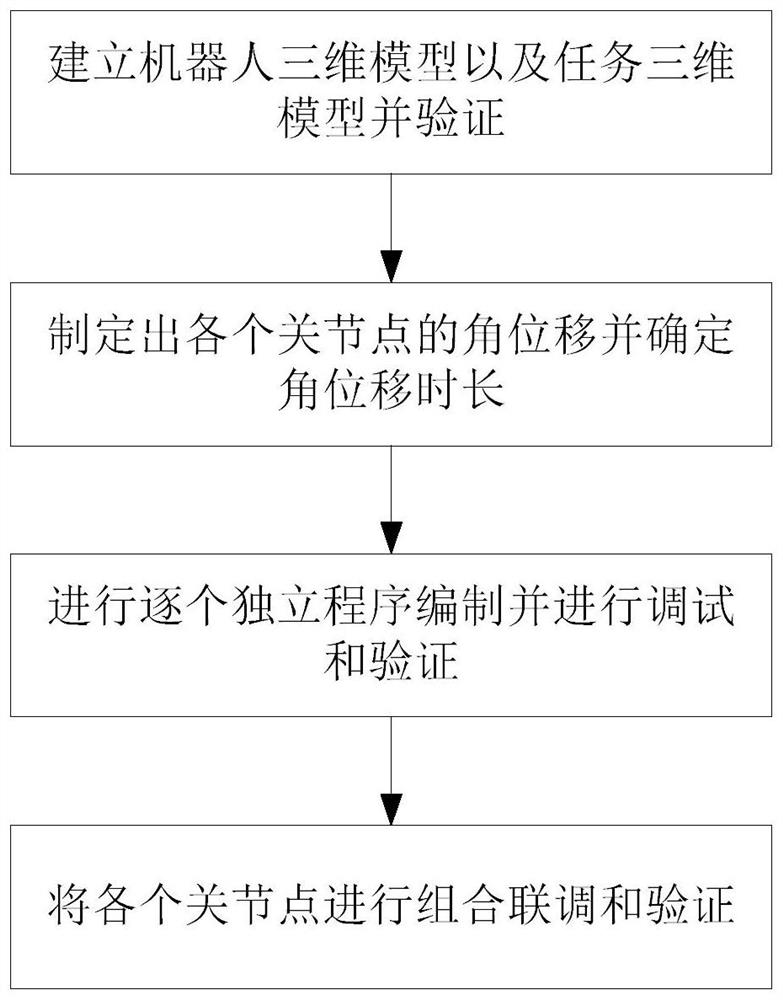
[0037] Such as figure 1 As shown, the multi-axis robot offline programming method disclosed in the present invention includes the following steps:
[0038] Step 1, establish the robot 3D model of the multi-axis robot and the task 3D model of the task, which can be obtained by scanning the multi-axis robot and the task through the existing 3D scanning technology, and approximate the model of the robot 3D model and the task 3D model The real-time point cloud data of 3D scanning is converted into the point cloud data format supported by AutoCAD through AutodeskReCap software, and then the 3D modeling is completed through the plug-in PointShape modeling tool of AutoCAD;
[0039] Step 2, after the model approximation verification is passed, the angular displacement of each joint point in the robot's 3D model is formulated according to the task 3D model, and the angular displacement duration of each joint point is determined; when formulating the angular displacement and angular dis...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More