

Arc-shaped spring driven three-degree-of-freedom decoupling parallel mechanism
A spring-driven, degree-of-freedom technology, used in manipulators, program-controlled manipulators, manufacturing tools, etc., can solve problems such as the axis offset of the rotating pair and the moving pair, the movement of the moving platform is not smooth, and the movement performance of the mechanism is affected, and the parallel structure is simple. , light weight, reduce the effect of processing
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0026] The following will clearly and completely describe the technical solutions in the embodiments of the present invention in conjunction with the embodiments of the present invention. Obviously, the described embodiments are only part of the embodiments of the present invention, not all of them. Based on the implementation manners in the present invention, all other implementation manners obtained by persons of ordinary skill in the art without making creative efforts belong to the scope of protection of the present invention.
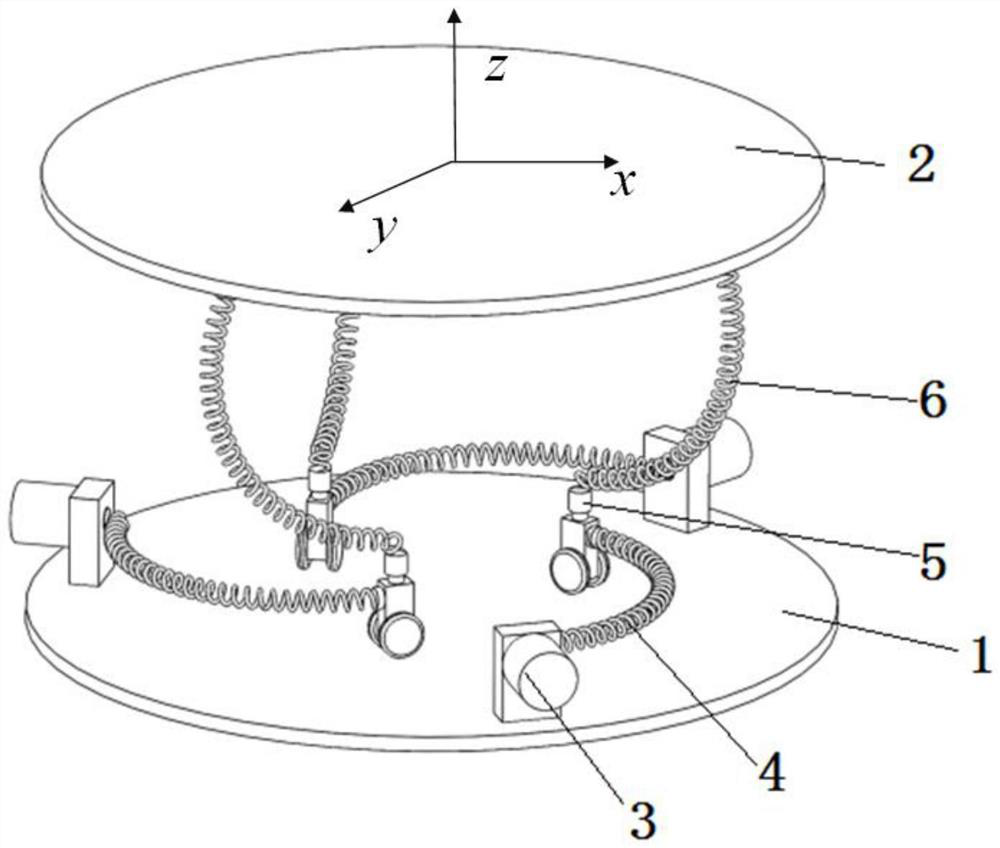
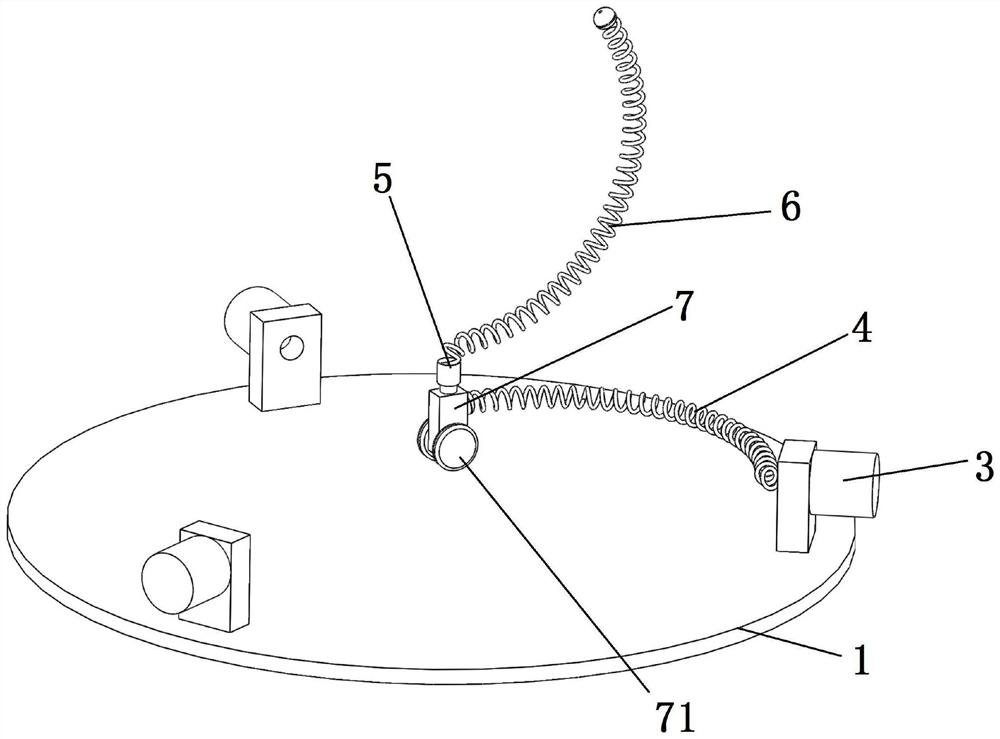
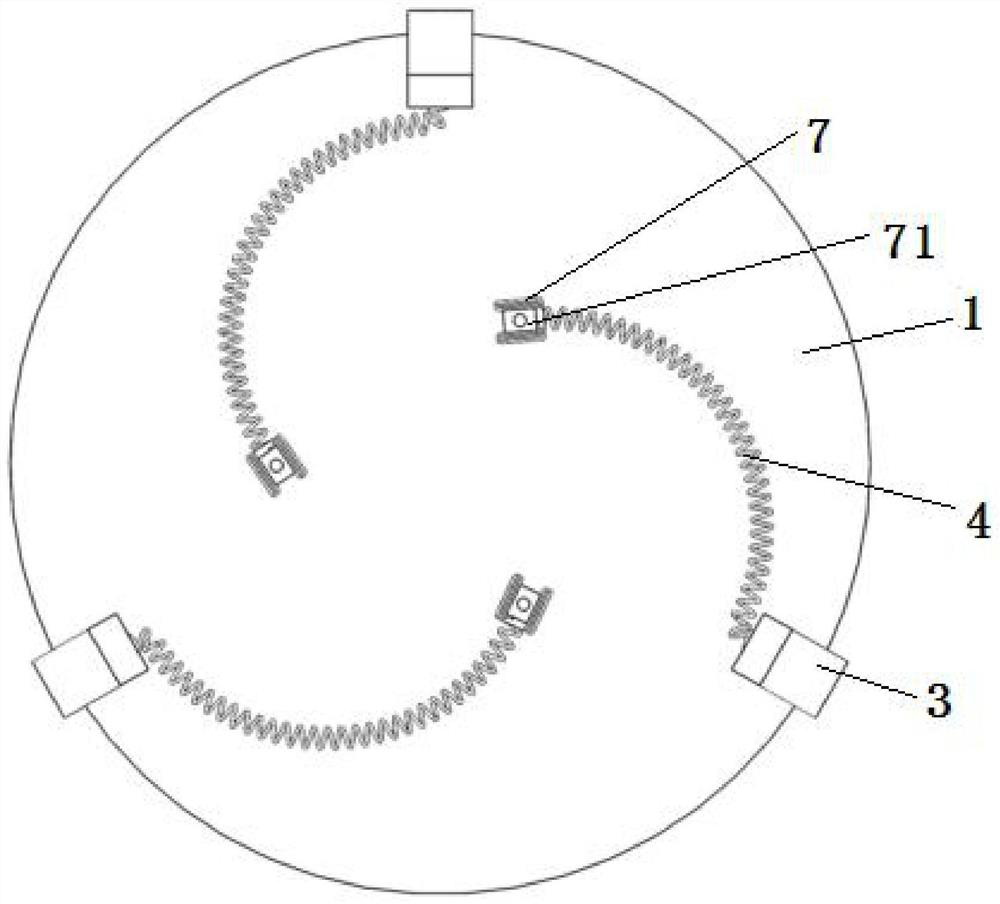
[0027] Such as Figure 1-7 As shown, a three-degree-of-freedom decoupled parallel mechanism driven by an arc spring includes:
[0028] fixed platform 1;
[0029] moving platform 2;
[0030] The first motion branch chain includes: a first heating component 3, a first shape memory alloy spring 4 and a slider, the number of the first heating component 3 is three and arranged on the fixed platform 1 at uniform intervals along the circumferential dire...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More