

A Fuzzy Control Algorithm for Single-Link Manipulator Based on Stochastic System under Limited Output and Time-delayed Input
A fuzzy control algorithm and stochastic system technology, applied in manipulators, program-controlled manipulators, manufacturing tools, etc., can solve problems such as input delays, achieve the effects of overcoming random disturbances, improving robustness and production efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0060] The present invention will be further described below in conjunction with the accompanying drawings and specific embodiments.
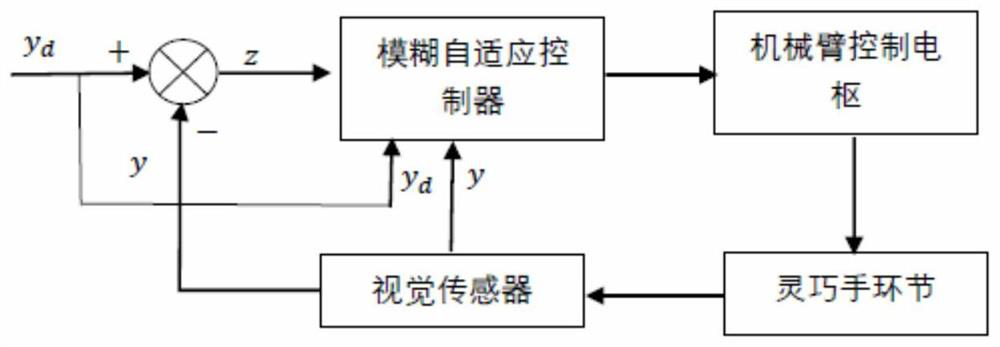
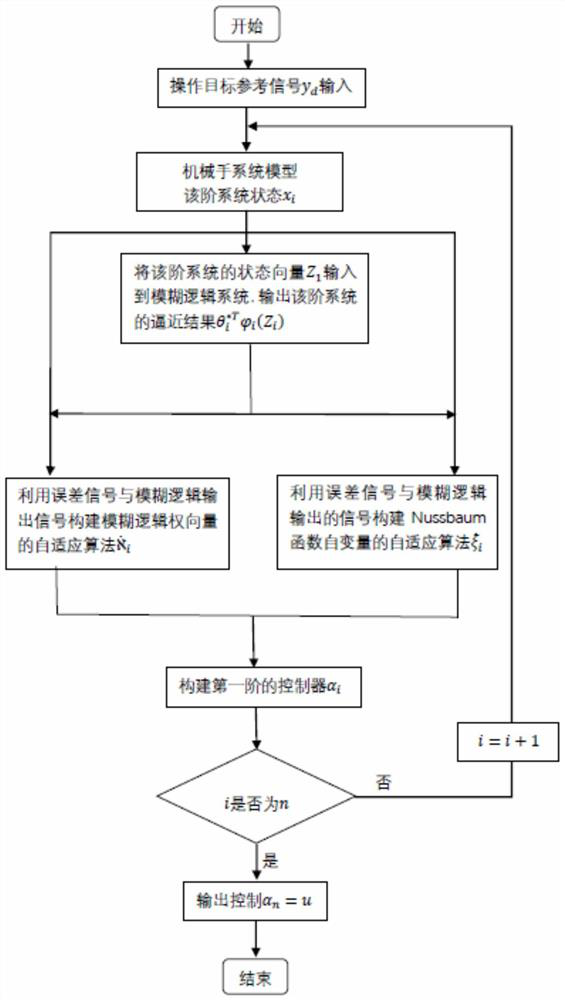
[0061] Such as Figure 1-3 , the present invention is a fuzzy control algorithm for a single-link manipulator based on a stochastic system under a limited output and input time-lag, comprising the following steps:
[0062] First, the output of the system is processed using a nonlinear transformation:
[0063] The first-order state x of the original system 1 That is, Y is constrained in the interval (-k c ,k c ), using the nonlinear transformation method proposed by the present invention to process as follows
[0064]
[0065] The reference signal is transformed into the following form
[0066]
[0067] The remaining states of each order are defined as x i , i=1,2,...,n, its form is the same as x in the above mathematical model i correspond to equal.
[0068] The input delay of the manipulator system controller can be processed by ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More