Omni-directional AGV with independent lifting and rotating platform function and control method
A rotating platform, independent lifting technology, applied in the field of AGV, can solve the problems of large space occupation and collision, and achieve the effect of avoiding collision
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
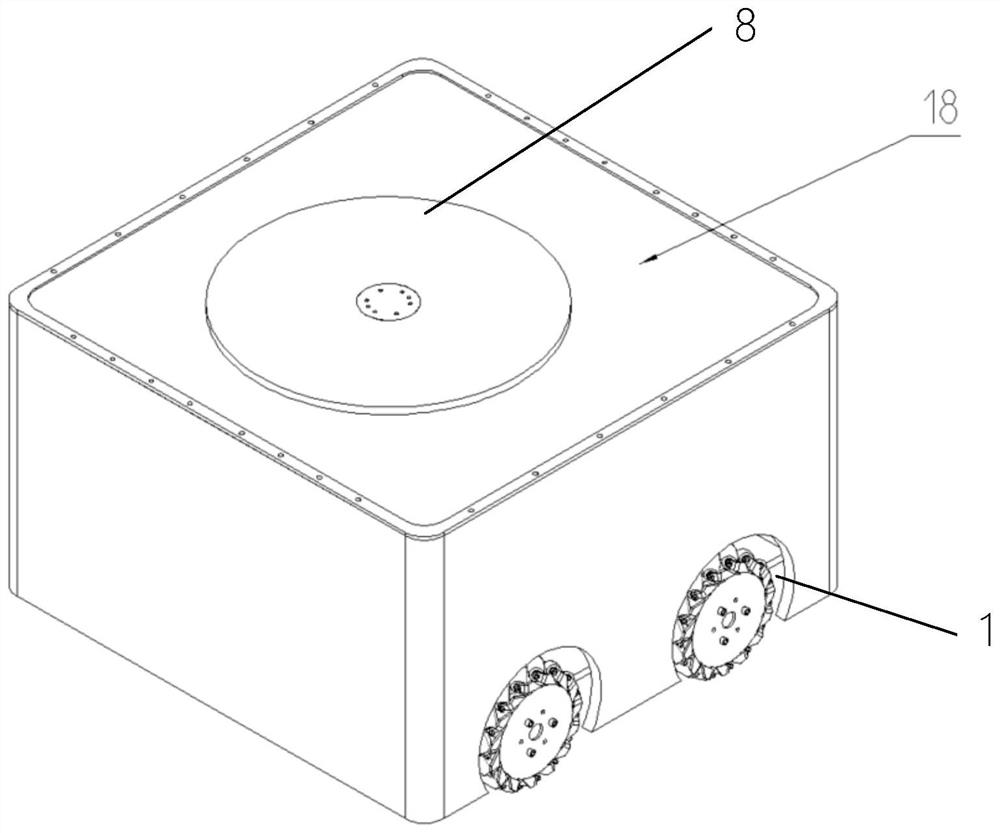
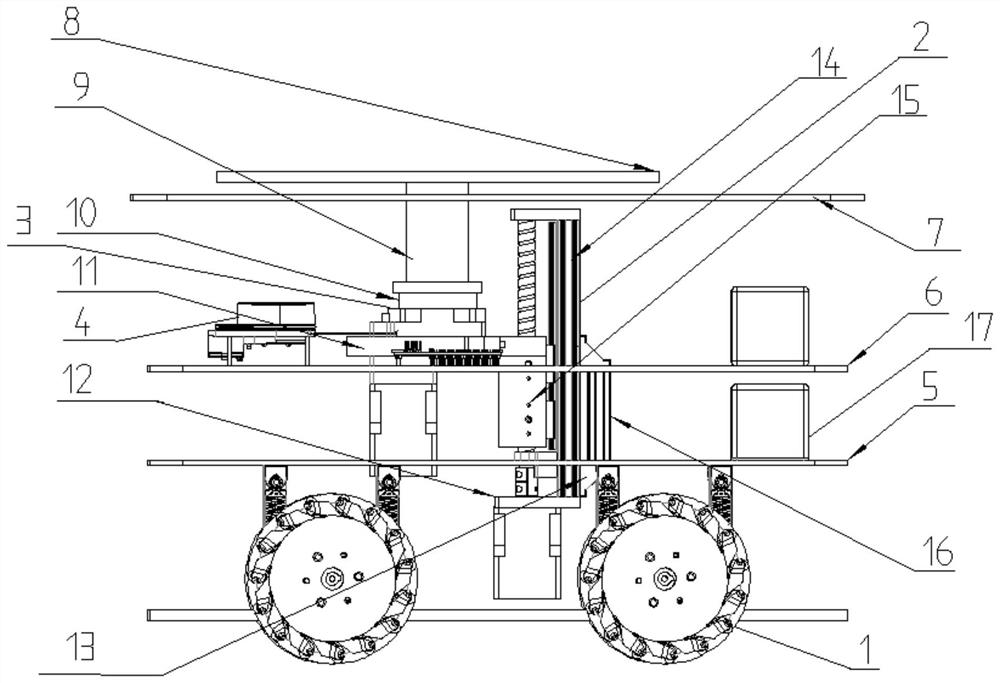
[0032] Embodiment: A kind of omnidirectional AGV and control method with independent lifting and rotating platform function of this embodiment, such as figure 1 As shown, it includes AGV chassis 1, lifting module 2, rotating module 3, and laser radar 4; the rotating module is used to control the rotation of the working round table, the rotating module 3 is installed on the lifting module 2, and the lifting module 2 is installed on the AGV chassis 1, and use corner codes 13 and profiles 16 to assist in fixing it on the chassis plate, and the AGV chassis 1 is used to drive the AGV.
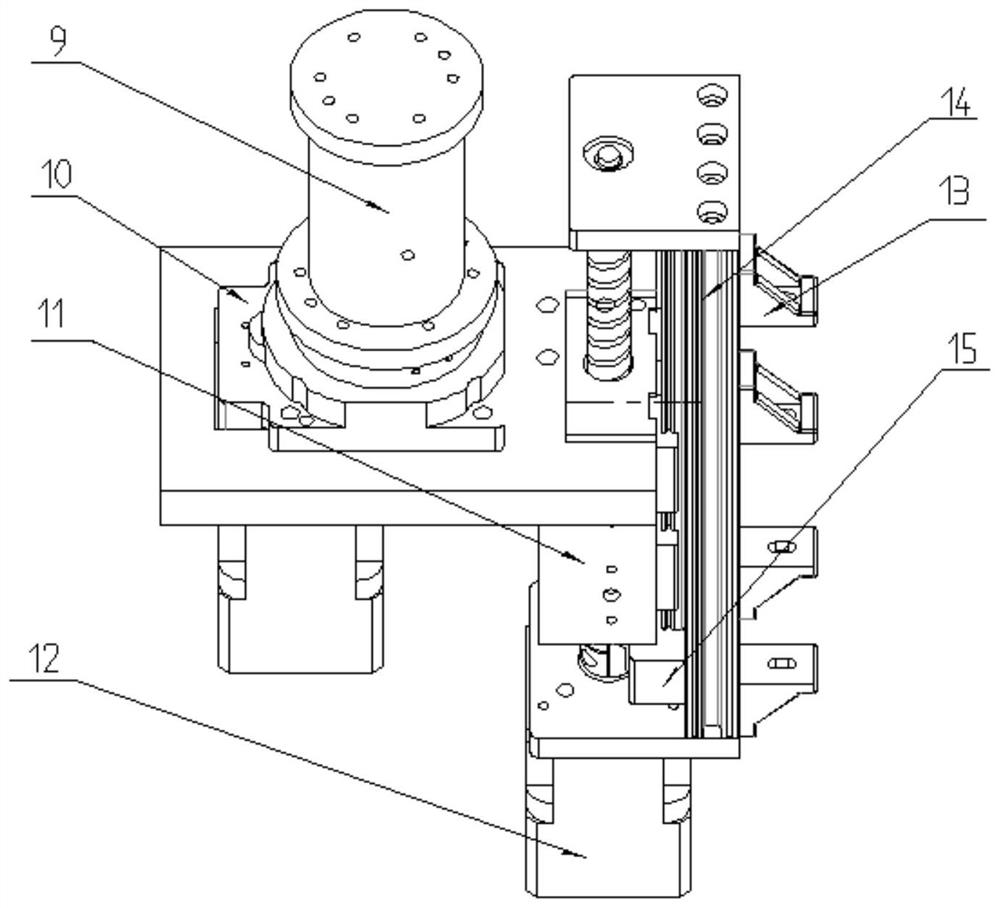
[0033] Such as figure 2 , image 3 As shown, the lifting module includes a DC servo motor 12, a ball screw 14, 4 linear slides 15 and an installation base 11; the output torque of the DC servo motor 12 is transmitted to the ball screw, and the ball screw 14 rotates The output is the linear movement of the linear slide table. The installation base 11 is in a square concave shape, which fits the li...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More