Method for improving ranging precision of radar based on Gaussian interpolation
A radar ranging and precision technology, applied in the field of Gaussian interpolation, can solve problems such as increased computation, reduced ranging accuracy, and waste of time and resources, and achieve the goals of reducing quantization errors, improving radar ranging accuracy, and reducing calculations Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0031] Now in conjunction with embodiment, accompanying drawing, the present invention will be further described:
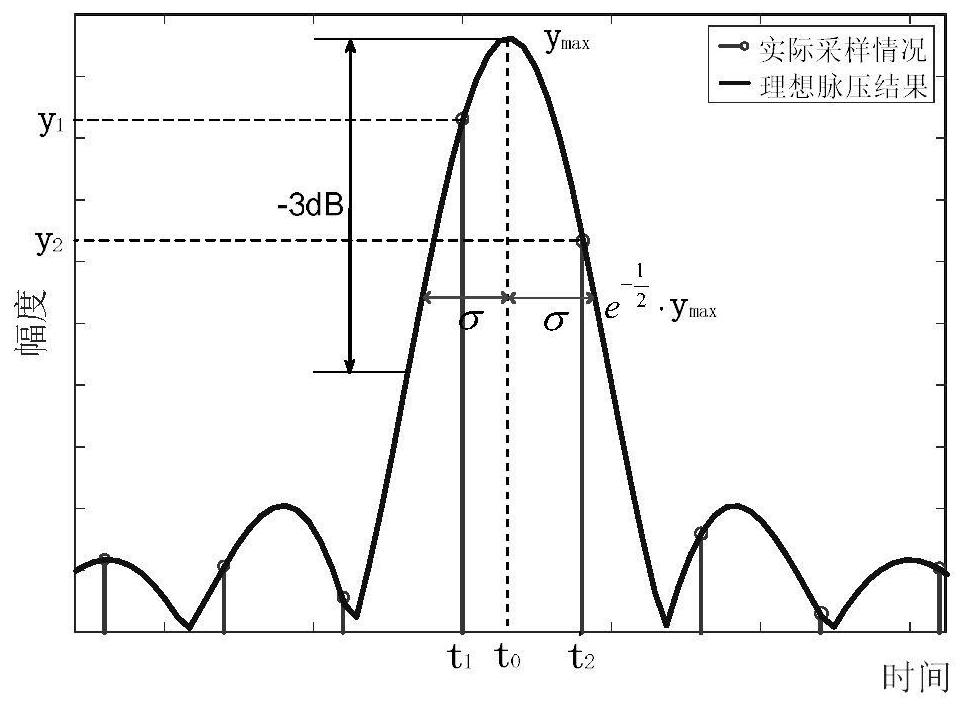
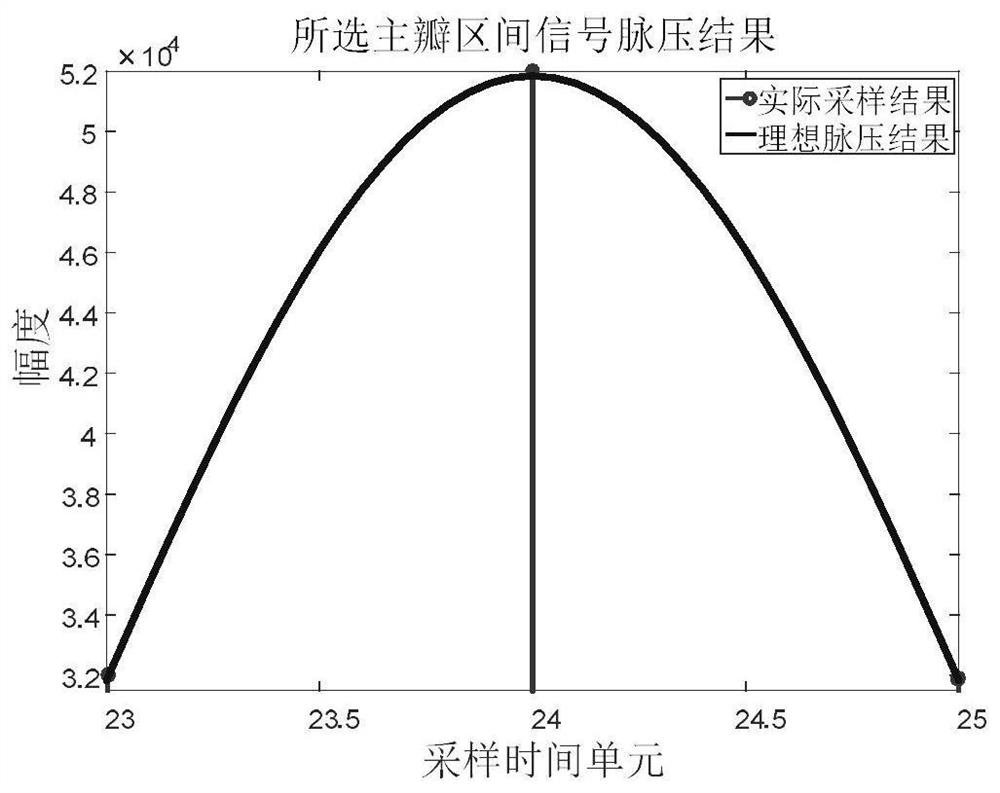
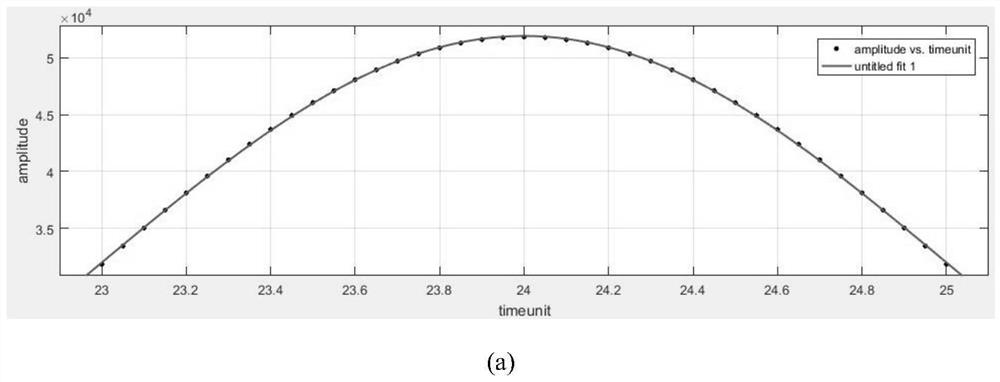
[0032] Using prior information, under the premise that the sampling rate, bandwidth and window function are selected and no noise is added first, when a higher reference sampling rate is selected to fit the echo pulse pressure result of a 3dB beamwidth to a Gaussian distribution function, no matter Whether to normalize the amplitude of the pulse pressure results, the fitted Gaussian distribution variance is a definite constant. Choose a higher sampling rate to get enough sampling points within the 3dB beamwidth, and then use the real sampling rate to normalize the sampling time, and then use the one-to-one corresponding sampling point data to fit the Gaussian distribution function , to obtain the only determined fitting variance value at this time. In the echo pulse pressure results, only the maximum value and the second maximum value sampling point are taken, a...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More 
PatSnap Eureka turns technology decisions into work you can execute. Powered by our Innovation Knowledge Graph, it runs expert workflows across engineering, life sciences, materials and intellectual property. Get your review-ready output in minutes.



