

Space target 6D attitude estimation technology based on image segmentation Mask and neural rendering
A space target and image segmentation technology, applied in 3D image processing, neural architecture, image data processing and other directions, can solve the problems of low stability and high labor and time cost, achieve low dependence, reduce labor and time costs, and improve Matching the effect of computational efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0018] specific implementation plan
[0019] The present invention will be further described below in conjunction with the accompanying drawings and specific embodiments.
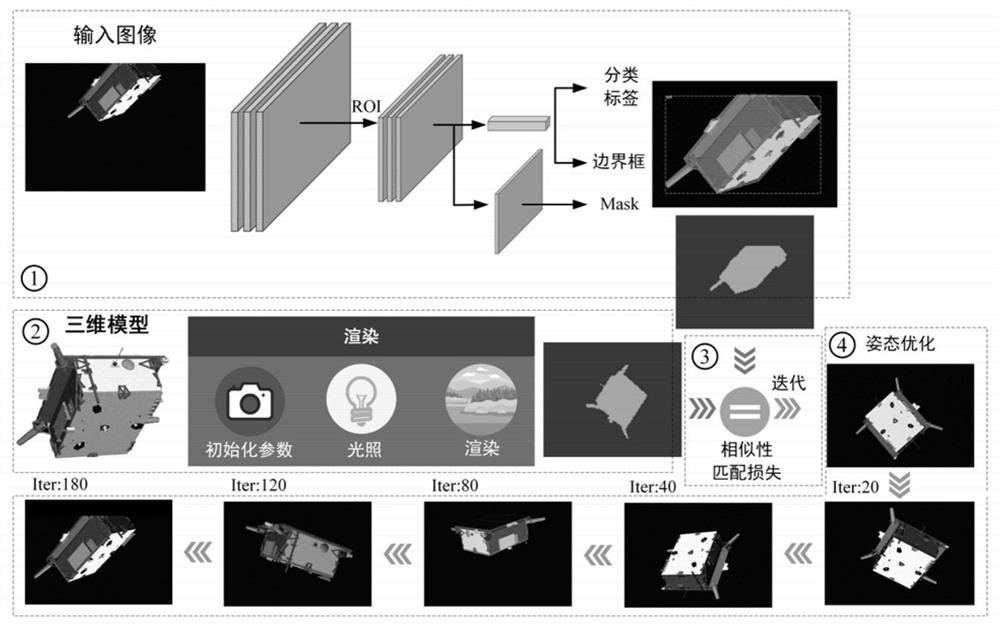
[0020] Such as figure 1 As shown, the present invention provides a 6D pose estimation technology for spatial objects based on image segmentation Mask and neural rendering, including instance segmentation branch 1, neural rendering branch 2, similarity matching loss 3, and pose optimization 4.
[0021] Instance segmentation branch 1 such as figure 2 As shown, in order to achieve accurate segmentation results, the original input image is first re-cropped. In the case of ensuring the original aspect ratio, the standard image size is 1024×1024. For non-square images, zero padding is required on the short side. Such as figure 2 (a) shown. Subsequently, the anchors detection target is generated under each size feature map of the RPN, and the bounding box regression is performed. By fine-tuning the position ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More