

Method for generating high-precision simulation point cloud model
A point cloud model, high-precision technology, applied in the field of data processing, can solve problems such as large amount of calculation, and achieve the effect of eliminating interference, high precision, and improving accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
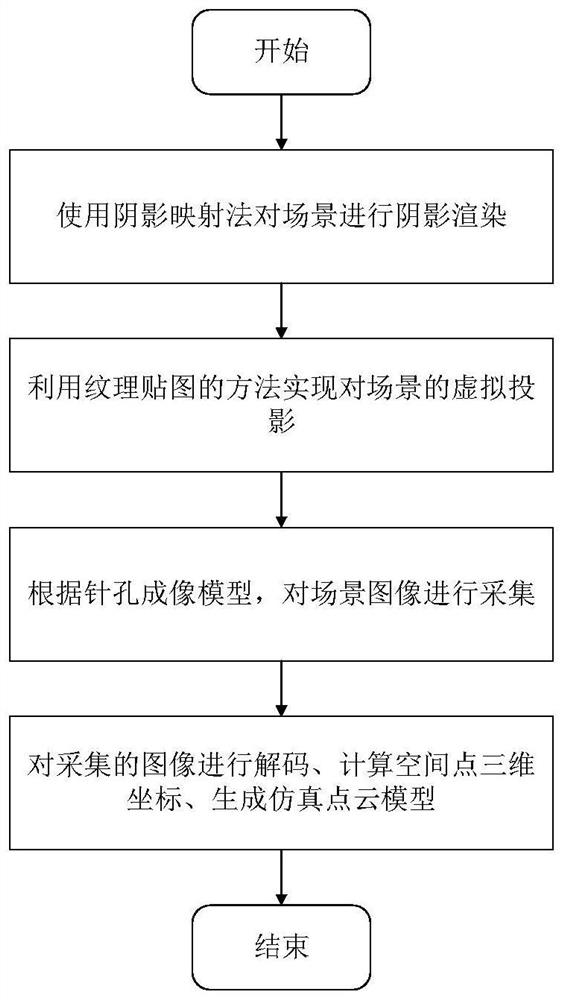
[0038] Such as figure 1 As shown, a method for generating a high-precision simulation point cloud model includes the following steps:
[0039] (1) Obtain the production line scene model established in the robot simulation software;
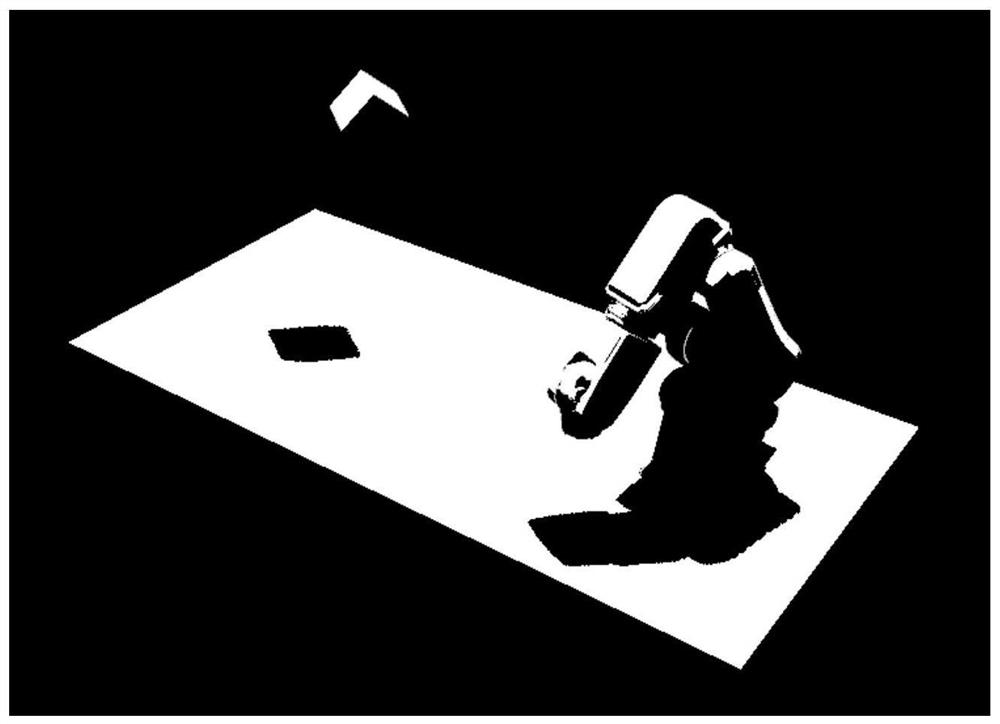
[0040] (2) In the coordinate system matching the production line scene model, according to the set light source position, use shadow mapping to render the production line scene model to obtain a production line scene model with correct shadow relationship.
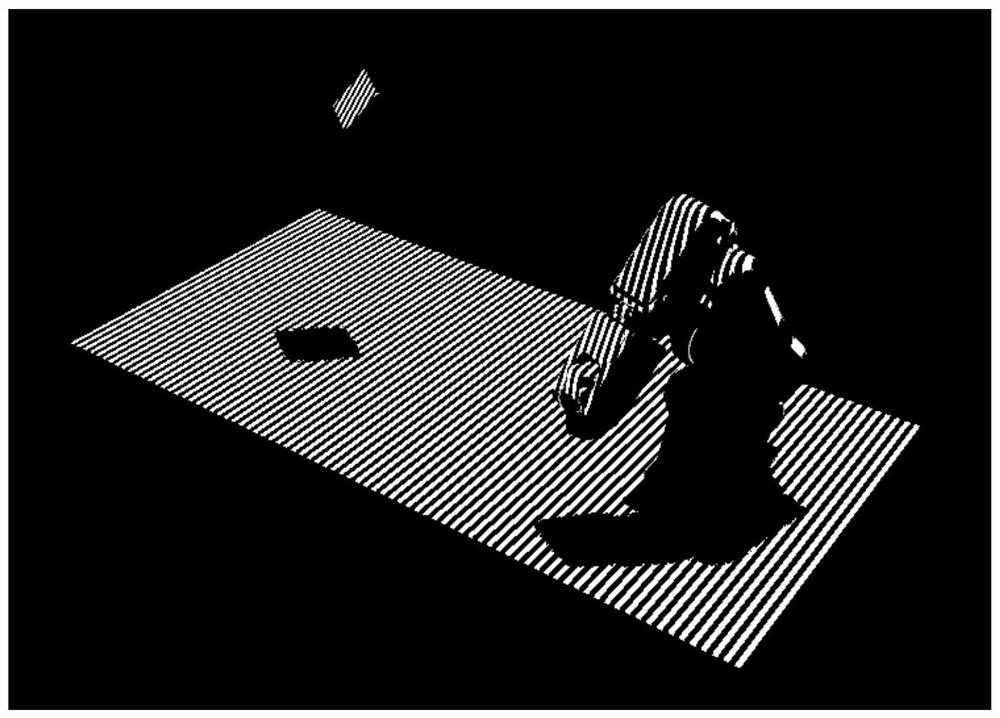
[0041] (3) In the coordinate system matched with the scene model of the production line, according to the set parameters, simulate and generate a virtual projector with a specified posture. Using the method of texture mapping, the scene obtained in (2) is rendered, simulating the projection function of the projector to the coding pattern;
[0042] (4) In the coordinate system matched with the scene model of the production line, according to the set parameters, simulate and generate a virtual...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More