

Multi-modal neuro-decoding control system and method for on-orbit operation of space manipulator
A space robotic arm and neural decoding technology, applied in the field of multi-modal neural decoding control system, can solve the problems of single biological information and few tasks, achieve good human-computer interaction effect, improve stability and reliability, and reduce errors. The effect of the possibility of operation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0040] Below, the present invention will be described in further detail in conjunction with the accompanying drawings.
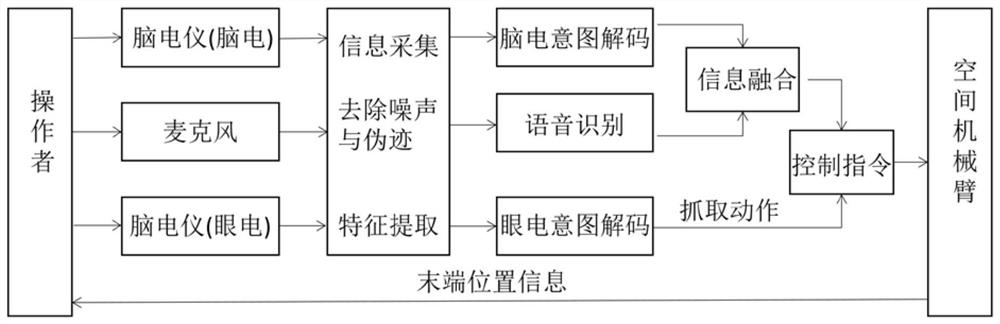
[0041] The invention applies the brain-eye tracking technology to the attitude stabilization control of the space manipulator in the weightless environment. Brain-eye movement control, as a new type of control method, gets rid of the requirements for body movements, breaks through the limitations of relying on astronauts to operate mouse keyboards, joysticks and other traditional manual controls, and eliminates the physical inconvenience caused by the weightlessness of space. Or the input obstacles encountered when interacting with the space manipulator due to reasons such as limited environment, realize two-way multi-mode human-computer interaction, complete the capture of failed satellites by the space manipulator in space, or complete the equipment operation of the space station, and enhance our country’s ability in space. advantages in the field.
[004...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More