


Quick Research
Generate reliable direction feasibility study reports for your R&D in just a few steps.

Technical Q&A
Discover and master advanced knowledge NOW. Basics, ideas, possibilities, all at once.

Find Solutions
As an expert in R&D theories, this can generate solutions to your technical problems instantly.

Evaluate Feasibility
Analyze your overall solution with one click, know your potential R&D risks in advance.

Monitor Landscape
Get weekly tech updates, stay abreast of the latest tech innovations and key insights.
Concrete dam cable crane warehousing track planning and control method
A trajectory planning and control method technology, applied in adaptive control, general control system, non-electric variable control, etc., can solve problems such as high operating frequency, low efficiency, and limited construction environment
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
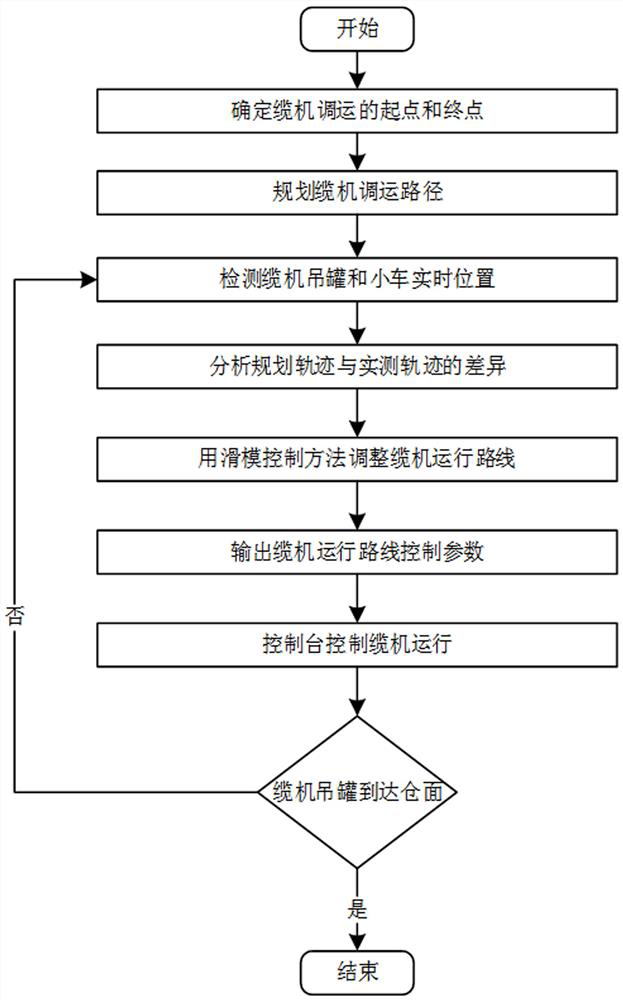
[0045] Such as figure 1 Among them, a concrete dam cable machine entry trajectory planning and control method, including the following steps:
[0046] S1. Determine the starting point and end point of the cable machine according to the location of concrete pouring and the location of the material supply point. The starting point is the installation point of the cable machine A(x a ,y a ,z z ); the end point is the cable machine unloading position B(x b ,y b ,z b );
[0047] S2, planning the path of cable machine transfer and transportation into the warehouse:
[0048] S 1 = S 1 (x 1 ,y 1 ,z 1 );
[0049] S3, install a positioning system and a wireless transceiver device on the cable crane tank; the positioning system locates the real-time coordinates (x, y, z) of the cable crane tank, and transmits them to the cable machine control terminal through the wireless transceiver device at regular intervals t The coordinate value of the hanging tank of the cable machine,...
Embodiment 2
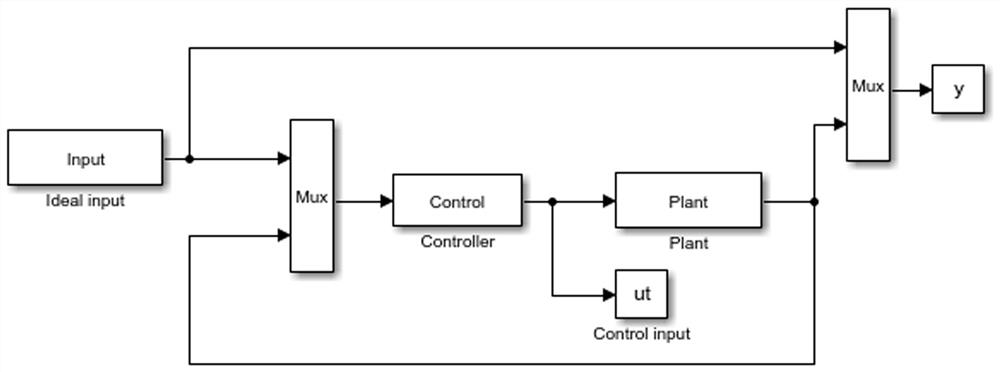
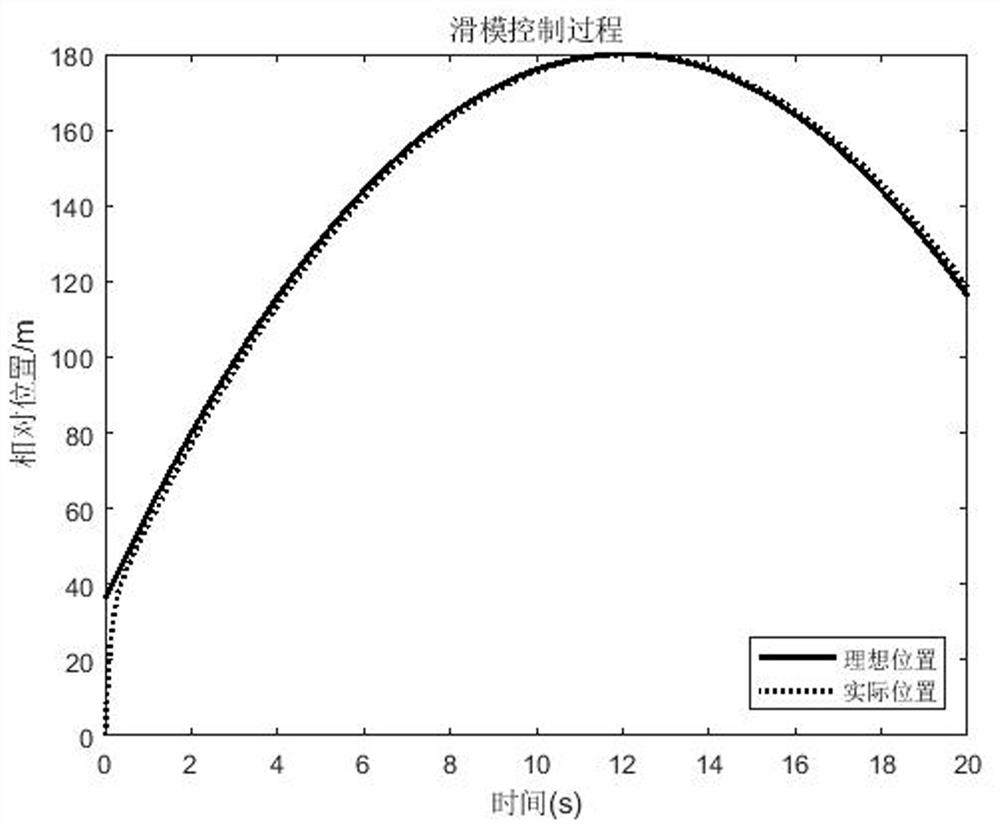
[0078] Such as Figure 2 ~ Figure 4 In this paper, the above-mentioned cable machine path control process is simplified as a two-dimensional plane control problem, assuming that the cable machine moves on the two-dimensional plane XOY, the starting point of the movement is A(0,40), the end point is B(20,120), the cable machine motion The highest point is H(12,180), and the trajectory line of the cable machine entering the warehouse is planned based on this, and the trajectory line of the cable machine entering the warehouse is regarded as a function of time t. The planning results are as follows:
[0079] S 1 =-(t-12) 2 +180;
[0080] where S 1 That is the ideal trajectory of the cable machine.
[0081] Suppose the actual running track equation of the cable machine is S=S(t), and the actual running track of the cable machine is also a function of time, then the position tracking error is: e(t)=S(t)-S 1 (t)=S(t)+(t-12) 2 -180; speed tracking error is:
[0082] The slid...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D Engineer
- R&D Manager
- IP Professional
- Industry Leading Data Capabilities
- Powerful AI technology
- Patent DNA Extraction
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2024 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com