

Control method of cleaning robot system
A technology for cleaning robots and control methods, which is applied in cleaning machinery, robot cleaning machines, two-dimensional position/channel control, etc., and can solve problems such as manual processing, single function of the base station, and poor mopping effect of cleaning robots
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
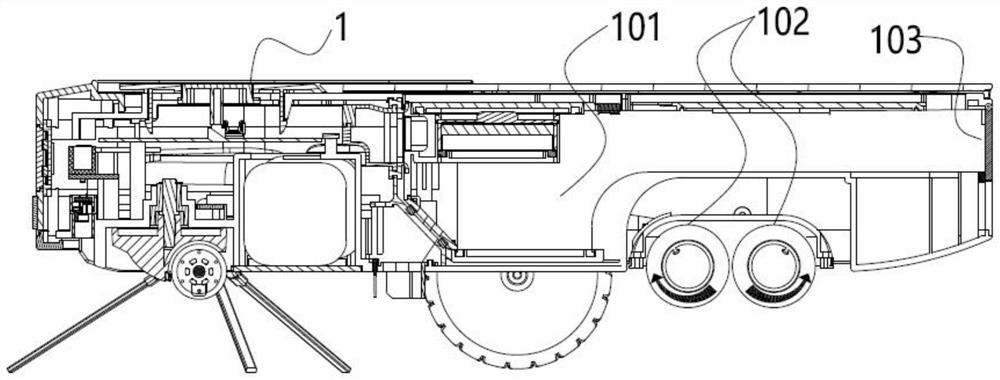
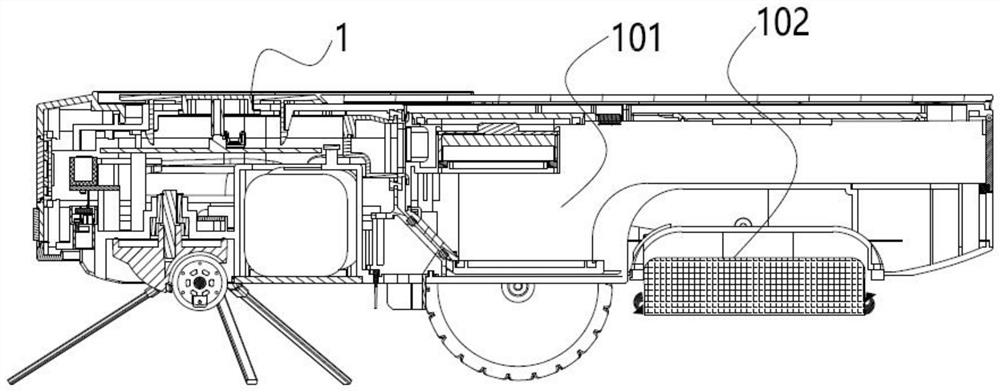
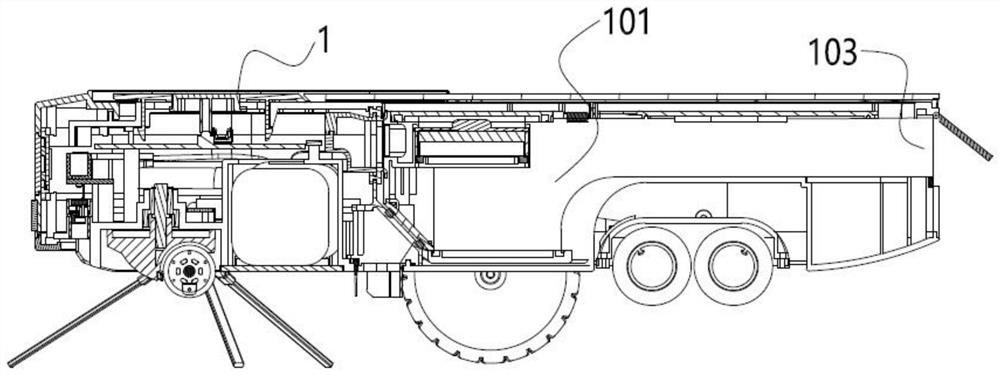
[0044] Embodiment: a control method of a cleaning robot system of the present invention, such as Figure 1 to Figure 6 As shown in the composition, the cleaning robot 1 is at least used for vacuum cleaning and mopping the floor, and the cleaning robot 1 is provided with at least a cleaning member 102 to mop and clean the floor; the cleaning robot 1 is provided with driving wheels for walking, cleaning Garbage cavity 101 is set in the robot 1, and the garbage cavity 101 communicates with the dust suction port at the bottom of the cleaning robot 1 to collect and suck the garbage on the ground into the garbage cavity 101 for collection. To realize the absorption of ground garbage belongs to the prior art and will not be described in detail.
[0045] For the mopping function of the cleaning robot 1, the bottom of the cleaning robot 1 is provided with a cleaning part 102, and the cleaning part 102 is set as a movable structure. Specifically, a control unit is provided in the cleani...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More