Laser SLAM method integrating ORB closed-loop detection
A closed-loop detection and laser technology, applied in the field of mobile robots, can solve the problems of no universal application, wrong matching, and difficulty in ensuring real-time performance of visual SLAM, and achieve good accuracy, reduce calculation time, and improve real-time performance
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0044] The idea, specific structure and technical effects of the present invention will be further described below in conjunction with the accompanying drawings, so as to fully understand the purpose, features and effects of the present invention.
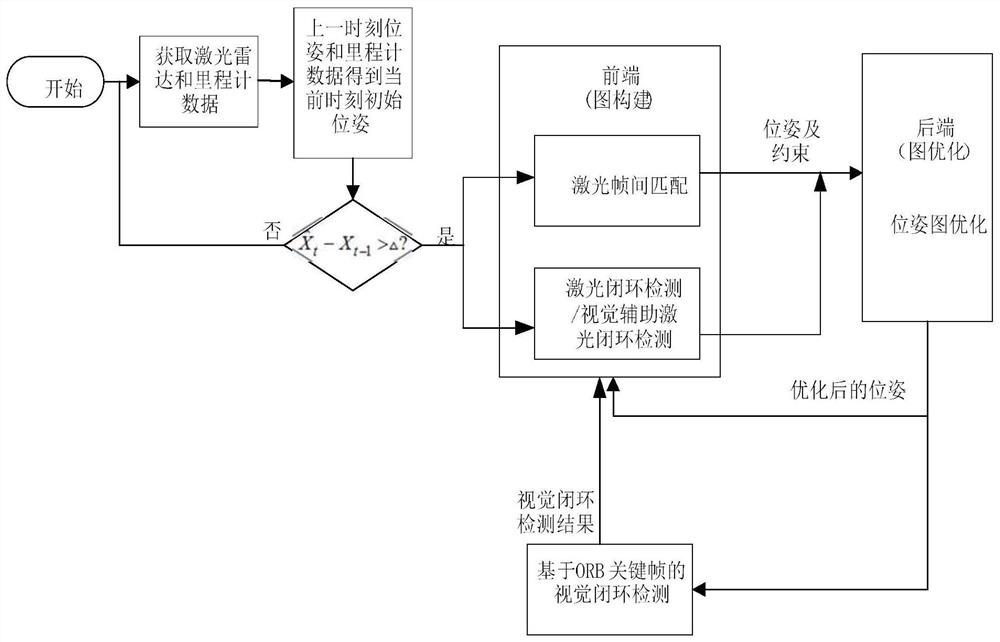
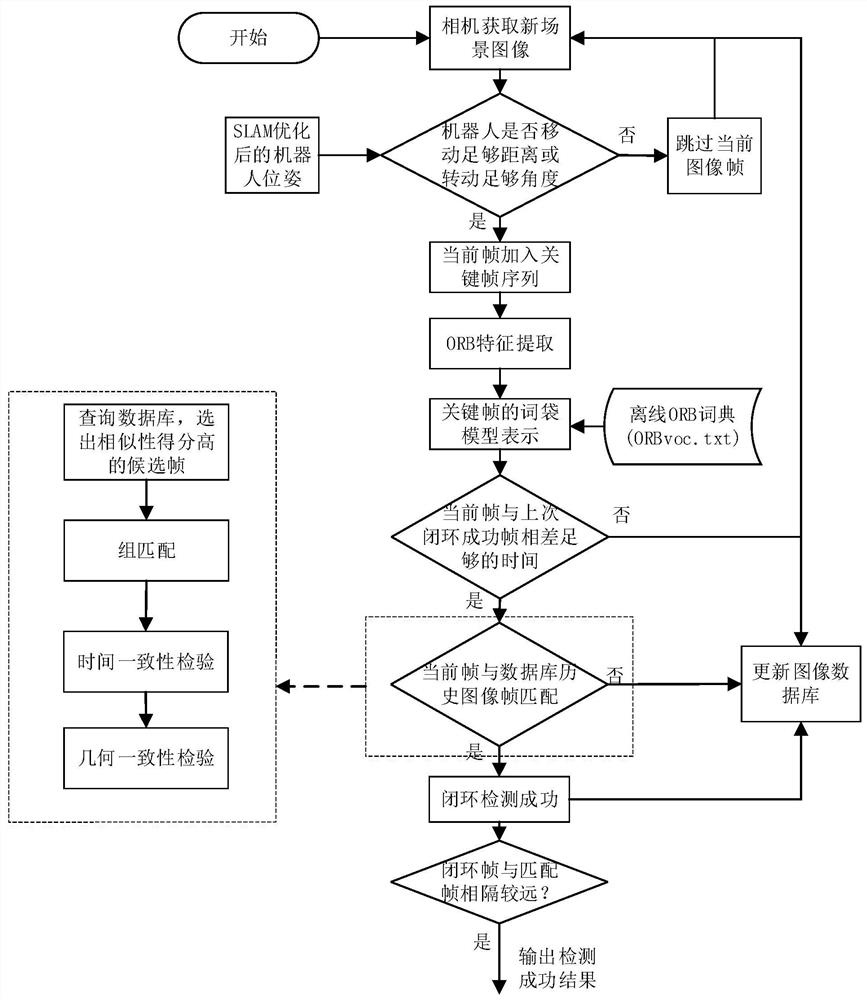
[0045] like figure 1 , 2 As shown, this embodiment discloses a laser SLAM method fused with ORB closed-loop detection, which is applied in the field of robotics. The laser SLAM method combined with ORB closed-loop detection includes a laser SLAM process and a visual closed-loop detection process running in parallel.
[0046] Specifically, such as figure 1 and figure 2 As shown, in the laser SLAM process, the robot continuously detects the pose information. When the change rate of the pose information between the previous key time point and the current time point is greater than the change rate threshold, the current time point is taken as the key time point and triggers A visual loop closure detection process.
[0047] In the...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com