

Mechanical arm pushing and grabbing system suitable for dense environment
A dense environment and robotic arm technology, applied in the direction of manipulators, program-controlled manipulators, claw arms, etc., can solve problems such as long training time, expensive system, and high sample complexity
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach
[0049] CoppliaSim simulation software, Pycharm programming environment installed in Ubuntu environment; PC uses Intelcore i7-7800k 3.50hz CPU, GPU is Nvidia TITAN Xp; color depth camera uses RealsenseD435; robotic arm uses UR5 robotic arm generated by Universal Robot; smart clip The holder is BY-P80.
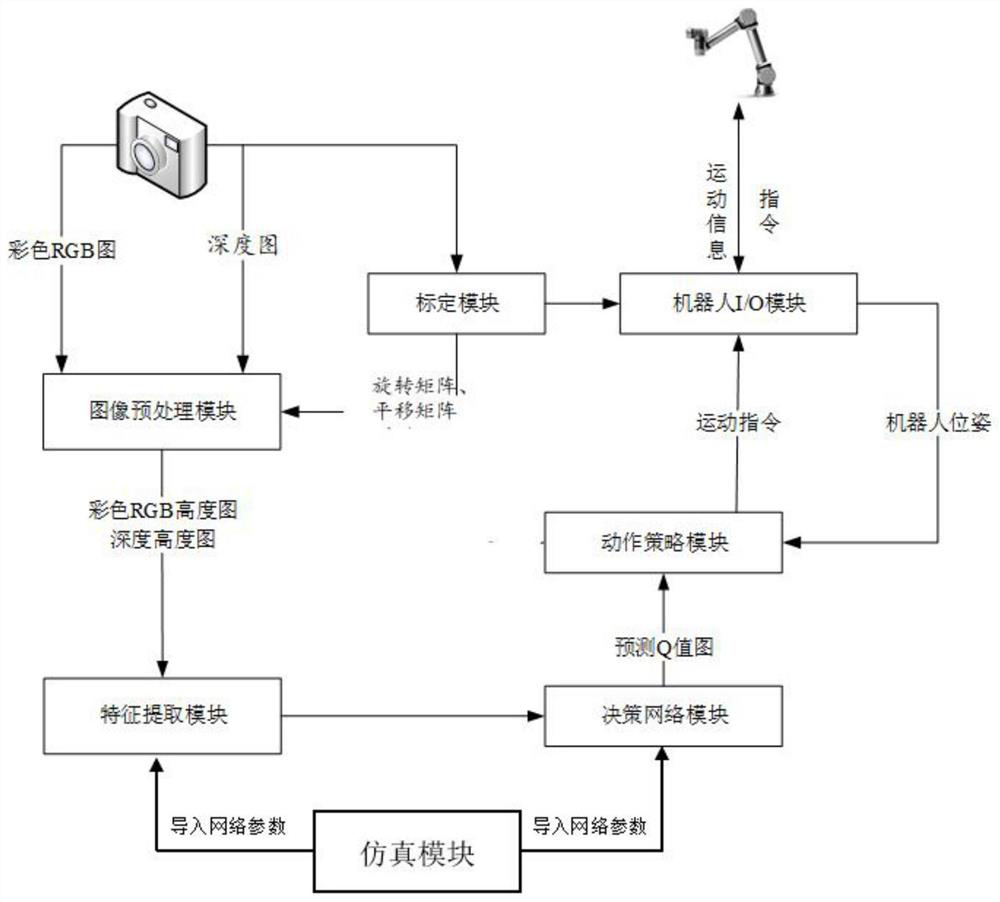
[0050] (1) Simulation system: its frame diagram is as follows figure 2 shown. Use the CoppliaSim simulation software to import the robotic arm, smart gripper, depth color camera and nine objects with different shapes and colors. It is necessary to change the friction coefficient to make it similar to the real world; construct the FCN neural network and initialize its parameters, the network structure diagram is as follows Figure 8 ; Use Pycharm to communicate with CoppliaSim; after the environment configuration is completed, start to train the simulation environment; get the trained neural network parameters and save them, the simulation flow chart is as follows Figure 9 ,...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More