

Three-degree-of-freedom robot neck device and working method
A technology of robot and degree of freedom, which is applied in the direction of manipulators, manufacturing tools, joints, etc., can solve the problems of low degree of freedom, poor flexibility, poor stiffness and dynamic performance, etc., and achieve the effect of large bearing capacity, compact structure and improved stiffness
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
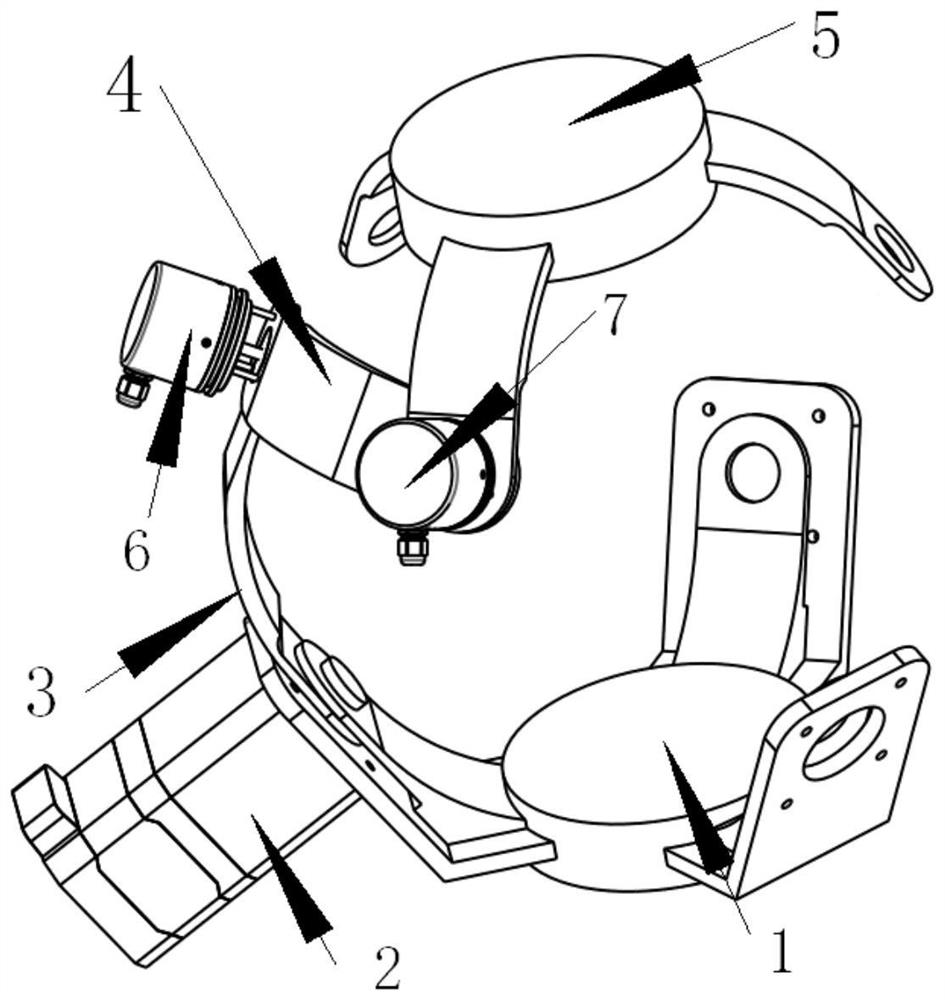
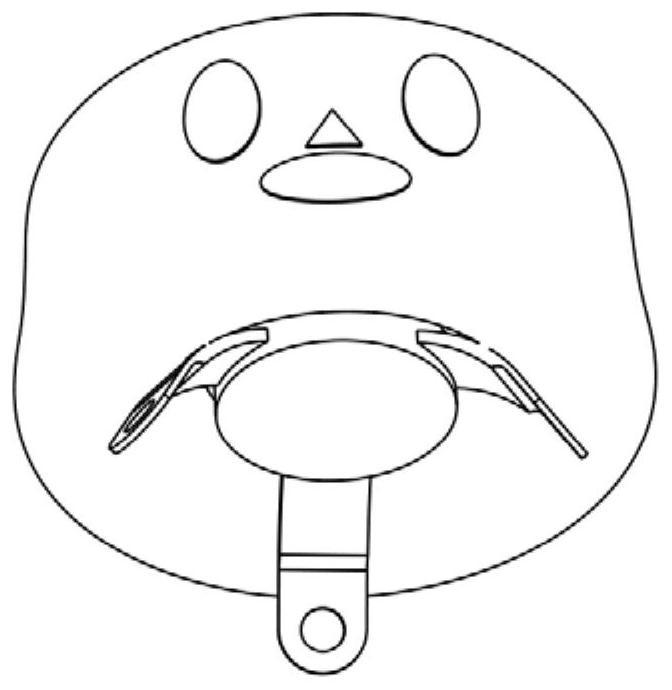
[0033] combine figure 1 , figure 2 and image 3 Describe this embodiment, in this embodiment, a kind of three-degree-of-freedom robot neck device that this embodiment involves, it comprises lower platform 1, transmission group, upper platform 5, control system and robot head, described transmission The set includes a motor 2, a first connecting rod 3 and a second connecting rod 4, the motor 2 is fixed on the lower platform 1, the drive shaft of the motor 2 is fixed to one end of the first connecting rod 3, and the first connecting rod The other end of the rod 3 is rotatably connected to one end of the second connecting rod 4, the other end of the second connecting rod 4 is rotatably connected to the upper platform 5, the control system is bidirectionally connected to the transmission group, and the robot head is arranged on Get on platform 5. The control system includes a No. 1 encoder 6, a No. 2 encoder 7 and a processor. The No. 1 encoder 6 is arranged at the junction of...
Embodiment 2
[0035] This embodiment is described in conjunction with Embodiment 1. In this embodiment, a three-degree-of-freedom robot neck device involved in this embodiment uses a rotary pair to rotate between the first connecting rod 3 and the second connecting rod 4. connection, the second connecting rod 4 and the upper platform 5 are connected by a rotating pair, and the input ends of the No. 1 encoder 6 and the No. 2 encoder 7 are respectively connected with the rotating pair. The number of the transmission groups is at least three groups, and the number of the No. 1 encoder 6 and the No. 2 encoder 7 is adapted to the number of the transmission groups. The transmission groups are evenly distributed on the upper platform 5 . The purpose of such setting is: the end of the first connecting rod 3 is connected with the head end of the second connecting rod 4 through a rotary pair, and a No. 1 encoder 6 is arranged on the rotating pair, so that the relative position of the first connecting...
Embodiment 3
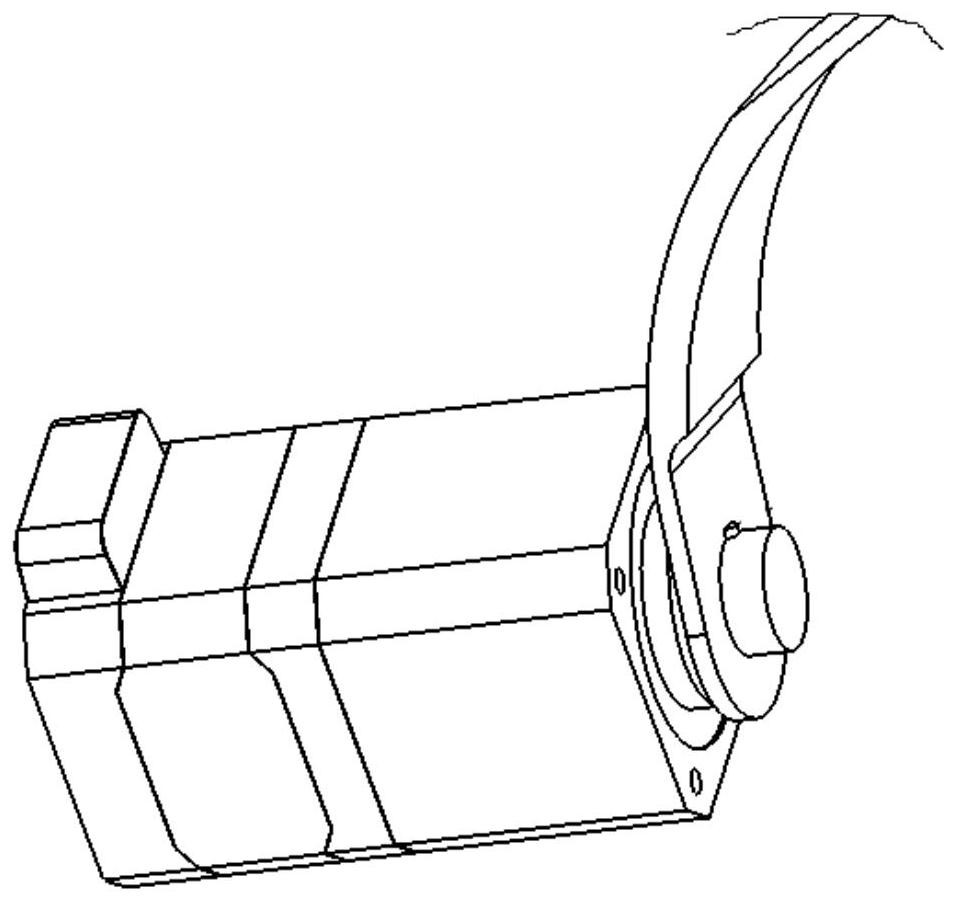
[0037] This embodiment will be described in conjunction with Embodiment 1. In this embodiment, a three-degree-of-freedom robot neck device involved in this embodiment, the first connecting rod 3 and the drive shaft of the motor 2 are fixed by a keyway. The purpose of this setting is to: figure 2 As shown: the first connecting rod 3 and the motor 2 are fixed together through a keyway, so that the first connecting rod 3 is driven by the motor 2 to rotate.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More