

Distributed driving vehicle steering stability control system and control method thereof
A stability control and distributed technology, applied in the direction of control devices, vehicle components, driver input parameters, etc., can solve the problems of inaccurate control of vehicle body stability, establishment of linkages with unstability indicators, and less consideration of proportional distribution issues, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0051] In order to make the purpose, technical solution and advantages of the present invention more clear, the present invention will be further described in detail below in conjunction with the accompanying drawings and examples. It should be understood that the specific embodiments described here are only used to explain the present invention, not to limit the present invention.
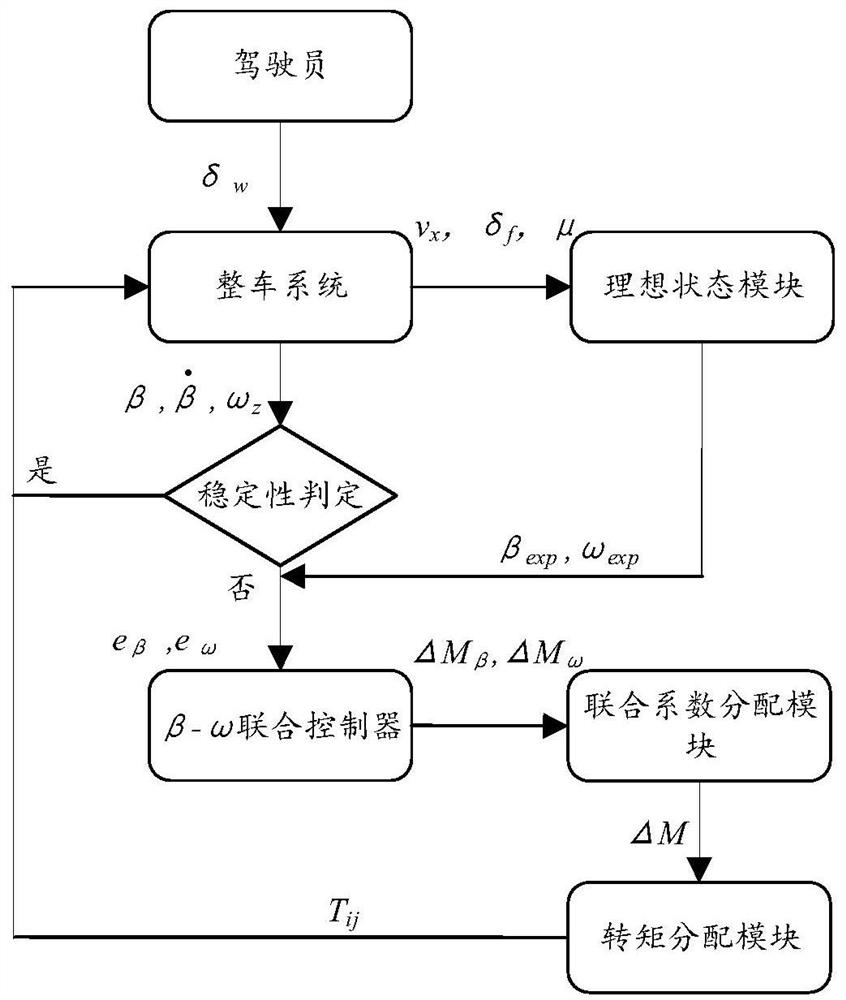
[0052] A distributed drive vehicle steering stability control system such as figure 1 As shown, it includes vehicle system, ideal state module, stability judgment module, β-ω joint controller, joint coefficient distribution module and torque distribution module;
[0053] The vehicle system receives the steering wheel angle δ w and the additional yaw moment T fed back by the torque distribution module ij , the whole vehicle system outputs the center-of-mass sideslip angle β and the side-slip angular velocity according to the input vehicle motion state parameters Yaw rate ω z To the stability j...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More