

Robot autonomous navigation control method and system based on deep learning
A technology of autonomous navigation and deep learning, applied in control/adjustment systems, two-dimensional position/channel control, vehicle position/route/altitude control, etc., which can solve problems such as limited obstacle information and inability to avoid obstacles and obstacles. , to improve the ability to avoid obstacles, facilitate data collection and labeling, and achieve good results
Pending Publication Date: 2021-04-23
南京中朗智能技术有限公司
View PDF7 Cites 6 Cited by
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
[0005] The system uses laser radar to scan the obstacle information around the robot. However, the commonly used laser radar is two-dimensional scanning, and the collected obstacle information is limited. It cannot avoid obstacles that are inconsistent with the laser radar height or irregular obstacles.
Method used
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
View moreImage
Smart Image Click on the blue labels to locate them in the text.
Smart ImageViewing Examples

Examples
Experimental program
Comparison scheme
Effect test
Embodiment
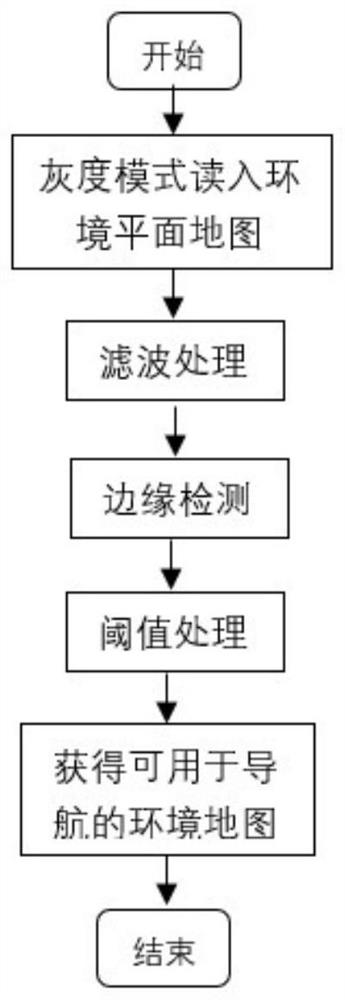
[0050] like figure 1 As shown, the flow chart of building an environment map based on image processing technology is as follows:
[0051]Step 1, obtain the plane map of the robot's working environment through the camera, and read in the two-dimensional plane map of the environment in grayscale mode;
[0052] Step 2, filtering the image of the environment map, such as Gaussian filtering, can reduce the noise of the image;
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
Login to View More PUM
 Login to View More
Login to View More Abstract
The invention discloses a robot autonomous navigation control method and system based on deep learning. The method comprises the following steps: setting a starting point and an end point of a robot in an environment map, and calculating the optimal path that the robot can drive; adopting a positioning algorithm for determining the position of the robot at the moment in the driving process, stopping movement when arriving at the end point, and otherwise continuing navigation; acquiring an environment information image in front of the robot by using a camera, inputting the environment information image into the trained convolutional neural network model, judging whether an obstacle with an unknown environment map influences the normal movement of the robot or not, if not, continuing navigation according to the optimal route, and if yes, generating a corresponding control instruction by using the network model, enabling the robot to avoid an unknown obstacle, and at the same time, replanning the optimal route, determining the position at the moment, and judging whether an end point is reached or not is judged. The system is based on a deep learning technology, can avoid various obstacles on a route planned by a global path, and is high in applicability.
Description
technical field [0001] The invention relates to the technical field of artificial intelligence, in particular to a deep learning-based autonomous navigation control method and system for a robot. Background technique [0002] With the rapid development of artificial intelligence technology, deep learning has been widely used in image recognition, speech recognition, unmanned driving and other fields. Similarly, robot technology is also developing in the direction of intelligence. Autonomous navigation is one of the key technologies of robots. Robots have the ability to intelligently analyze the environment and make various decisions like humans to avoid obstacles. reflect. [0003] At present, the commonly used robot autonomous navigation control system mainly includes: [0004] 1) Autonomous navigation control system based on global path planning and dynamic window local obstacle avoidance [0005] The system uses lidar to scan the obstacle information around the robot. ...
Claims
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
Login to View More Application Information
Patent Timeline
 Login to View More
Login to View More Patent Type & AuthorityApplications(China)
IPC IPC(8): G05D1/02
CPCG05D1/024G05D1/0246G05D1/0257G05D1/0221G05D1/0276
Inventor郭玲陆刘兵季京玮郎耀东
Owner南京中朗智能技术有限公司