

Multi-modal data fusion drivable area detection method based on point cloud up-sampling
A driving area, data fusion technology, applied in measurement devices, re-radiation of electromagnetic waves, radio wave measurement systems, etc., can solve the problems of insufficient use of image information, unsuitable road scenes with a structured degree, etc., and achieve rapid growth. Scale aggregation information, fast and accurate detection and segmentation, and the effect of improving accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
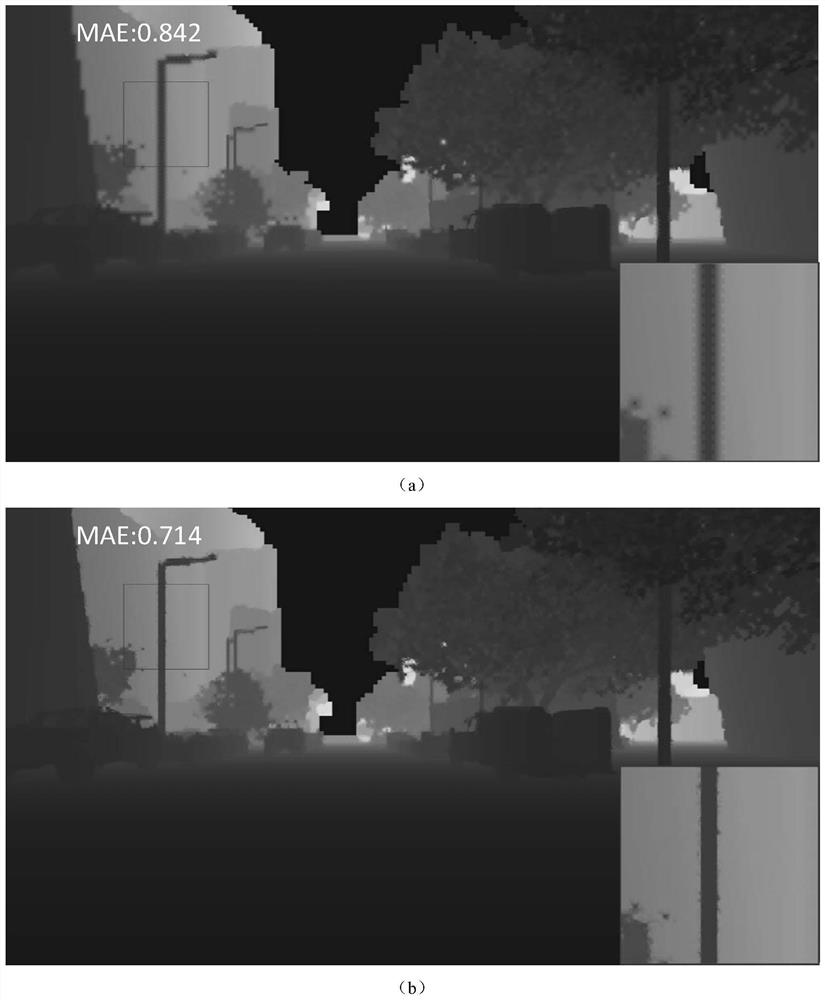
[0051] This embodiment mainly compares the performance indicators of the joint bilateral filtering upsampling algorithm JBU and the adaptive upsampling method based on edge strength information in the present invention. In this embodiment, the depth true value Figure 5 The sparse point cloud image is obtained by downsampling, and the upsampling effect of the two methods is compared. image 3 (a) and (b) represent the JBU upsampling result and the upsampling result of the method of the present invention respectively. It can be found that the method of the present invention can better prevent edge blurring while reducing reconstruction errors.
Embodiment 2
[0053] This example mainly uses the KITTI data set to compare the drivable area detection performance of a single image data network, a single point cloud data network, and a multi-modal data fusion network in the present invention. The detection results of the three networks are as follows: Figure 4 As shown, it can be seen intuitively that the multi-modal data fusion drivable area detection method in the present invention can further improve the accuracy of road detection, avoid false detection of vehicles to a large extent, and at the same time improve the reliability of boundary detection. sex.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More