

A Beidou three-frequency precision relative navigation method for inertial refueling of unmanned aerial vehicles
An aerial refueling and inertial assistance technology, which is applied in the field of inertial/satellite integrated navigation, can solve the problems that the satellite navigation system cannot meet the high-precision and high-reliability requirements of aerial refueling, the update rate of satellite navigation data is low, and the accuracy of satellite navigation is reduced. Achieve the effects of improving the real-time performance of the system, improving the fixed success rate, and increasing the data sampling rate
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0049] The following will clearly and completely describe the technical solutions in the embodiments of the present invention with reference to the accompanying drawings in the embodiments of the present invention. Obviously, the described embodiments are only some, not all, embodiments of the present invention. Based on the embodiments of the present invention, all other embodiments obtained by persons of ordinary skill in the art without making creative efforts belong to the protection scope of the present invention.
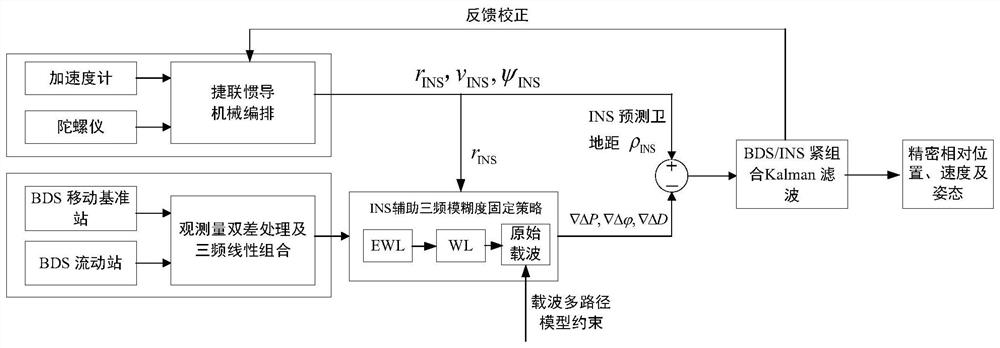
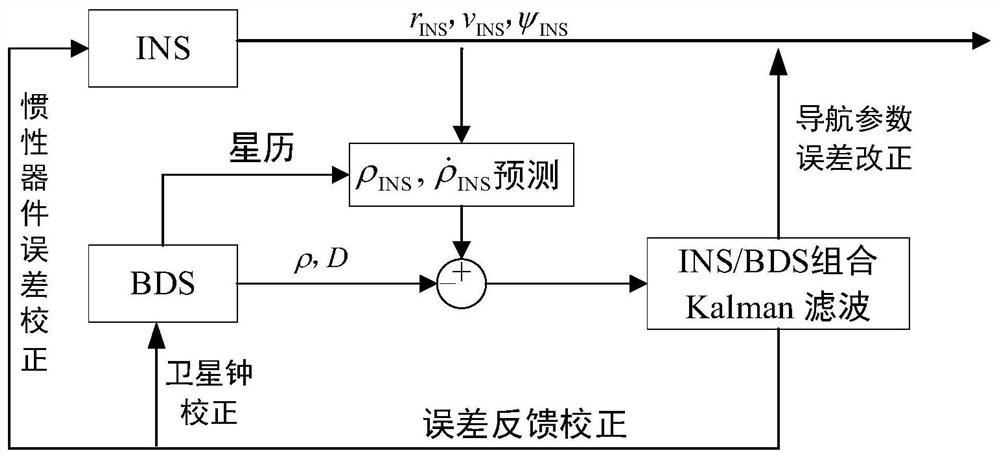
[0050] Such as Figure 1-5 As shown, the present invention provides a UAV aerial refueling inertial-assisted Beidou three-frequency precision relative navigation method. The specific steps are as follows:
[0051] 1. The BDS / INS tight combined absolute positioning is realized on the tanker, that is, the error state quantity of the Beidou satellite navigation system and the error state quantity of the inertial system are combined as the state quantity of the in...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More