

Maneuvering array orientation estimation method based on sparse Bayesian learning
A sparse Bayesian and azimuth estimation technology, applied in the field of maneuvering array azimuth estimation based on sparse Bayesian learning, can solve problems such as unsatisfactory performance, improve the accuracy of azimuth estimation and azimuth resolution, and solve the ambiguity of starboard and starboard , Suppress the effect of port and starboard blur
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment 1
[0065]according toFigure 1 - Figure 6As shown, the present invention provides a method of maneuvering an array based on sparse Bayes, including the following steps:
[0066]Motor array azimuth estimation method based on sparsebieles learning, including the following steps:
[0067]Step 1: Construct a sparse signal model of a motor array according to the array of sonar arrays and platform navigation systems.
[0068]The step 1 is specifically:
[0069]Step 1.1: Set k in the direction of the land coordinate system θ = {θ1, ..., θK} Of the far field narrowband signal, where θKFor the kth far field narrowband signal, it is incident on a uniform linear array of half-wavelength composed of M element and the group pitch, and the incident direction remains unchanged within the observation time, when the array occurs, the array pointing It will change over time, indicating the guide vector of the target signal by the following formula.t(k):
[0070]
[0071]
[0072]Among them, λ is the signal wavelength,Timing ...
specific Embodiment 2
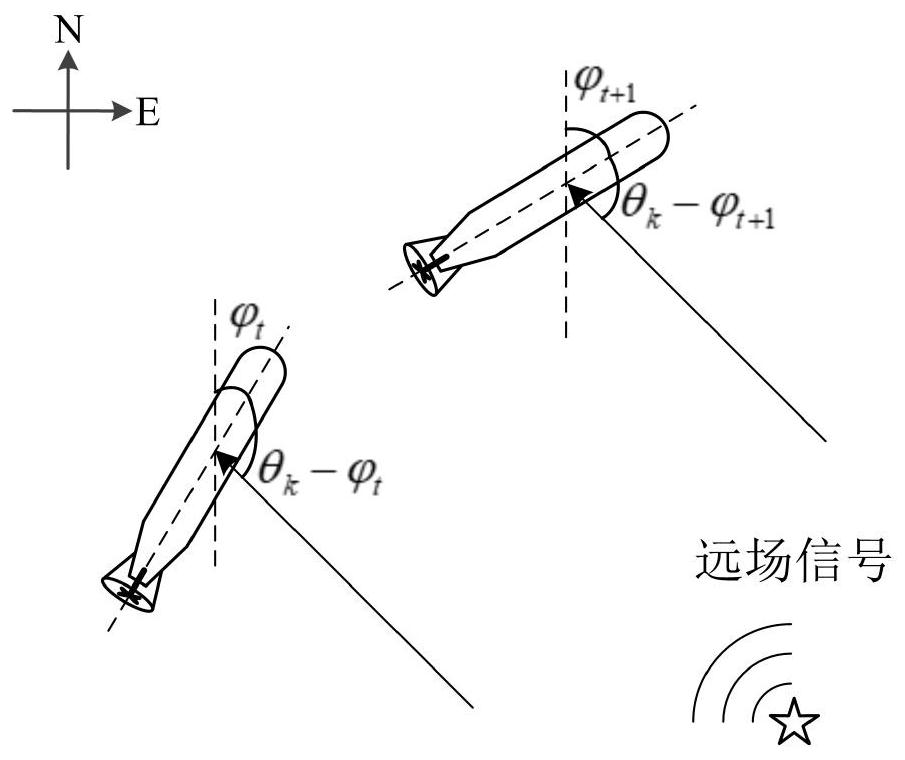
[0118]Schematic diagrams of the actuation of the remote field goals such asfigure 1 Indicated. Assume that K is θ = {θ in the direction of the earth coordinate system1, ..., θK} The far field narrowband signal is incorporatedized from the M group elements, and the spacing of the group element is on the uniform linear array of the half-wavelength, and the incident direction remains unchanged within the observation time. When the array occurs, the pointing point of the array will change over time, the guide vector of the target signal can be expressed as
[0119]
[0120]among them,(·)TIndicates the matrix transposition, λ is the signal wavelength,Timed the angular angle of the time change, T indicate the moment. As shown in the formula (1), the orientation vector At(k) Not only with the azimuth θ of the target under the land coordinateskRelated to arrays that are also related to the timerelated. Therefore, the array receive signal model can be expressed as
[0121]X (t) = at(θ) s (t) + n (t),...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More