

Robot surgery positioning method and device
A technology of robotic surgery and positioning method, applied in the field of robotic surgery positioning method and device based on ultrasound guidance, can solve the problems of difficulty in control, expensive equipment and the like
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
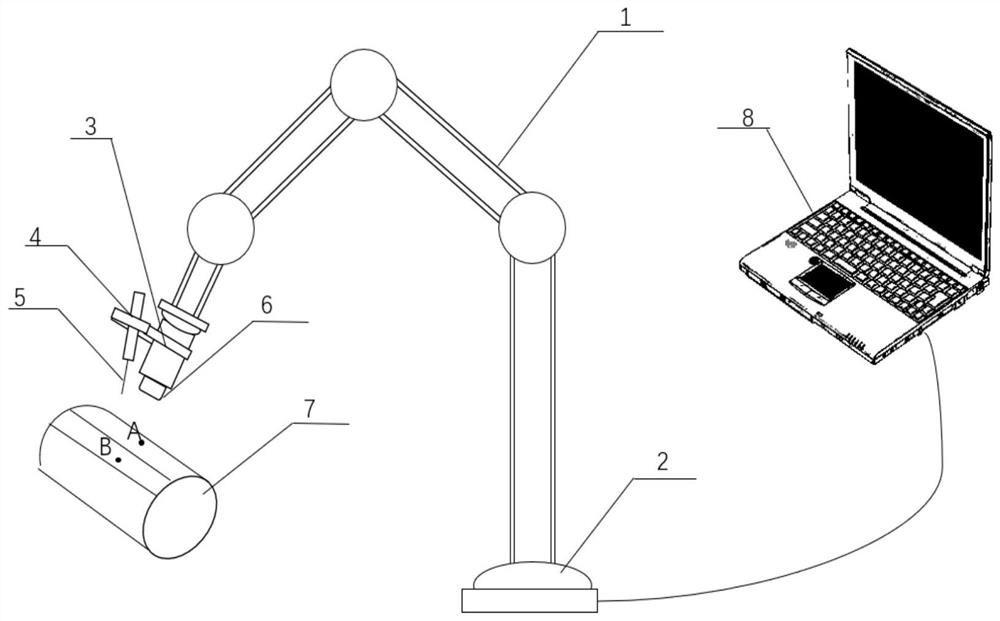
[0023] The robot surgical positioning method based on ultrasound guidance proposed by the present invention includes:
[0024] The robot carries an ultrasonic probe to scan the diseased part of the patient, obtains the ultrasonic image of the patient's lesion, identifies the lesion and its spatial location information, uses image segmentation technology based on deep learning to locate the lesion, and detects the ultrasonic image of the lesion in real time. When the position of the lesion is displaced, the position of the surgical tool is compensated in multiple degrees of freedom to achieve high-precision positioning of the surgical position.
[0025] The robot surgical positioning method based on ultrasound guidance proposed by the present invention includes:
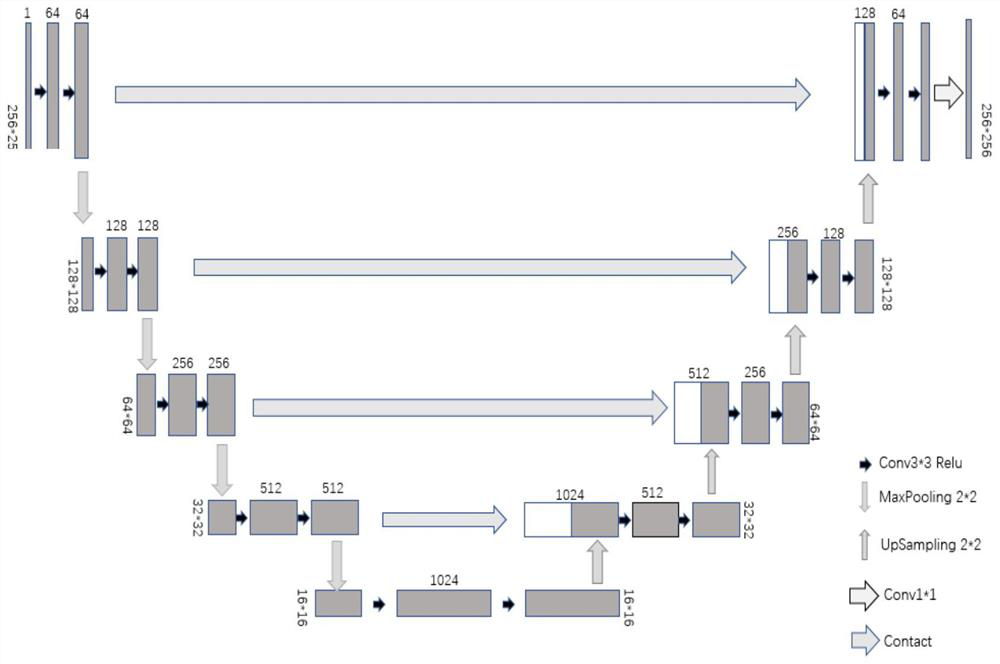
[0026] (1) Establish a UNet neural network, such as figure 1 As shown, the UNet neural network includes five downsampling layers, four upsampling layers and an output layer. The first downsampling layer includes two ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More