

Suppression method for subsynchronous resonance of doubly-fed wind generating set and converter
A doubly-fed wind power generation and subsynchronous resonance technology, applied in wind power generation, electrical components, harmonic reduction devices, etc., can solve the problems of economic loss, wind turbine off-grid and crowbar circuit damage, system entry, etc., and achieve engineering realization. The effect of strong performance, safe and stable operation, and high engineering reliability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
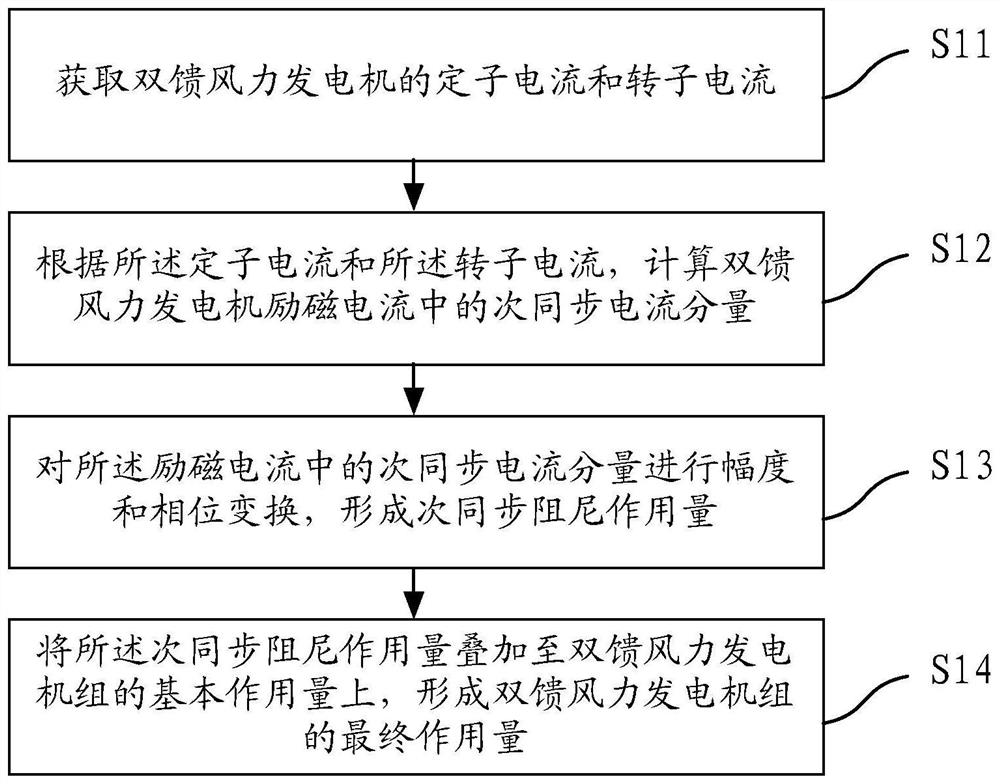
[0044] By observing the stator current and rotor current, the subsynchronous resonance damping component is issued by the RSC.
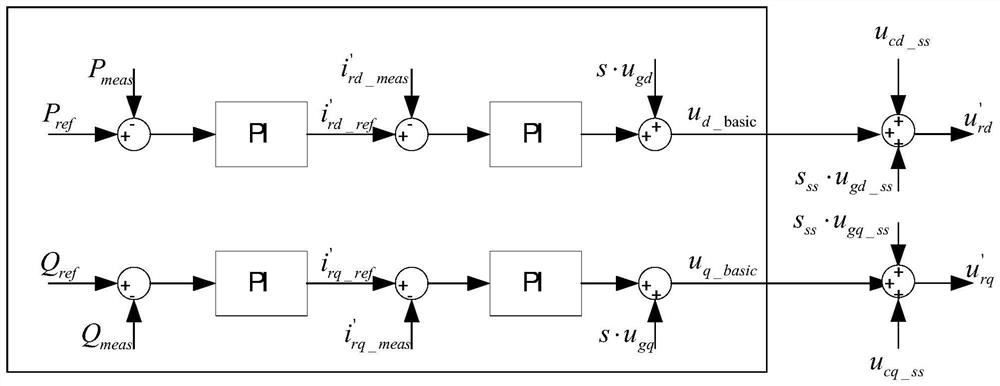
[0045] image 3 The basic loop shown (the part shown in the box in the figure) is the control mode of power loop and current loop. The subsynchronous damping action is superimposed on the output action of the current loop to form the final action.
[0046] Among them, P ref , Q ref Respectively active power, reactive power command, P meas , Q meas are active power measurement value and reactive power measurement value respectively, i rd_ref , I rq_ref is the rotor current loop instruction, i rd_meas , I rq_meas is the measured value of the rotor current, u cd_ss , u cq_ss is the subsynchronous damping action on the dq axis, u rd , u rq Output action for dq axis. s is the fundamental component slip. u gd , u gq is the grid voltage dq axis component.
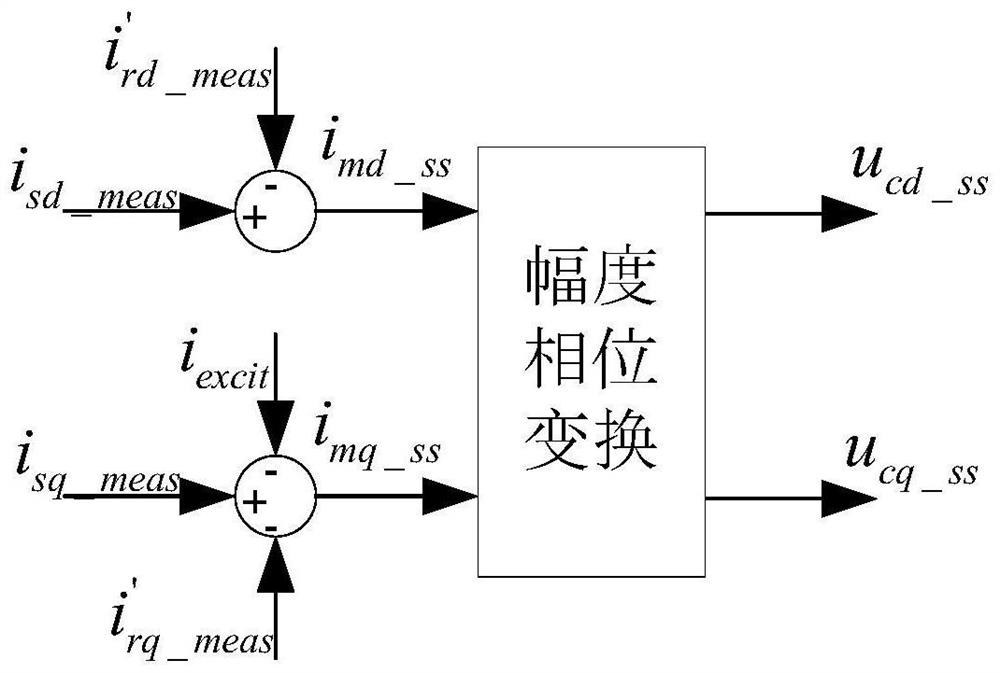
[0047] Observation and generation of subsynchronous actions, such as figure 2 shown....
Embodiment 2
[0055] By observing the stator current and rotor current, the subsynchronous resonance damping component is issued by the GSC.
[0056] Figure 5 In the middle voltage loop and current loop control mode, the subsynchronous damping action is superimposed on the output of the current loop to form the final action. u dc_ref is the DC bus voltage loop control command, U dc_meas is the measured value of DC bus voltage, i d_ref , I q_ref is the current loop dq axis command, i d_meas , I q_meas is the measured value of GSC current, u d_basic , u q_basic is the current loop output action of the basic loop, u cd_ss , u cq_ss is the last synchronous damping action on the dq axis, u d , u q The final output action for the dq axis.
[0057] The generation of the secondary synchronous action is the same as in Embodiment 1, such as figure 2 shown. The generated subsynchronous action u cd_ss , u cq_ss , superimposed on the feedforward path of the basic control loop.
[0058...
Embodiment 3
[0060] figure 2 The generated subsynchronous damping action u cd_ss , u cq_ss During the magnitude-to-phase conversion module, the Figure 7 The implementation method shown.
[0061] Subsynchronous current i md_ss i mq_ss , respectively multiplied by the amplitude adjustment coefficient k 1 and k 2 , get u d_ss_ampc with u q_ss_ampc . when k 1 and k 2 When equal, only the magnitude of the secondary synchronous action is adjusted. and k 1 and k 2 When non-equal coefficients are used, in addition to adjusting the magnitude of the subsynchronous action, it can also have a phase adjustment effect.
[0062] After amplitude adjustment, for u d_ss_ampc with u q_ss_ampc The phase shifting operation is then performed to obtain the required subsynchronous damping component.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More